DCREG2 15P0059B3
DCREG4 USER MANUAL
99/200
6.5 OPERATION QUADRANTS
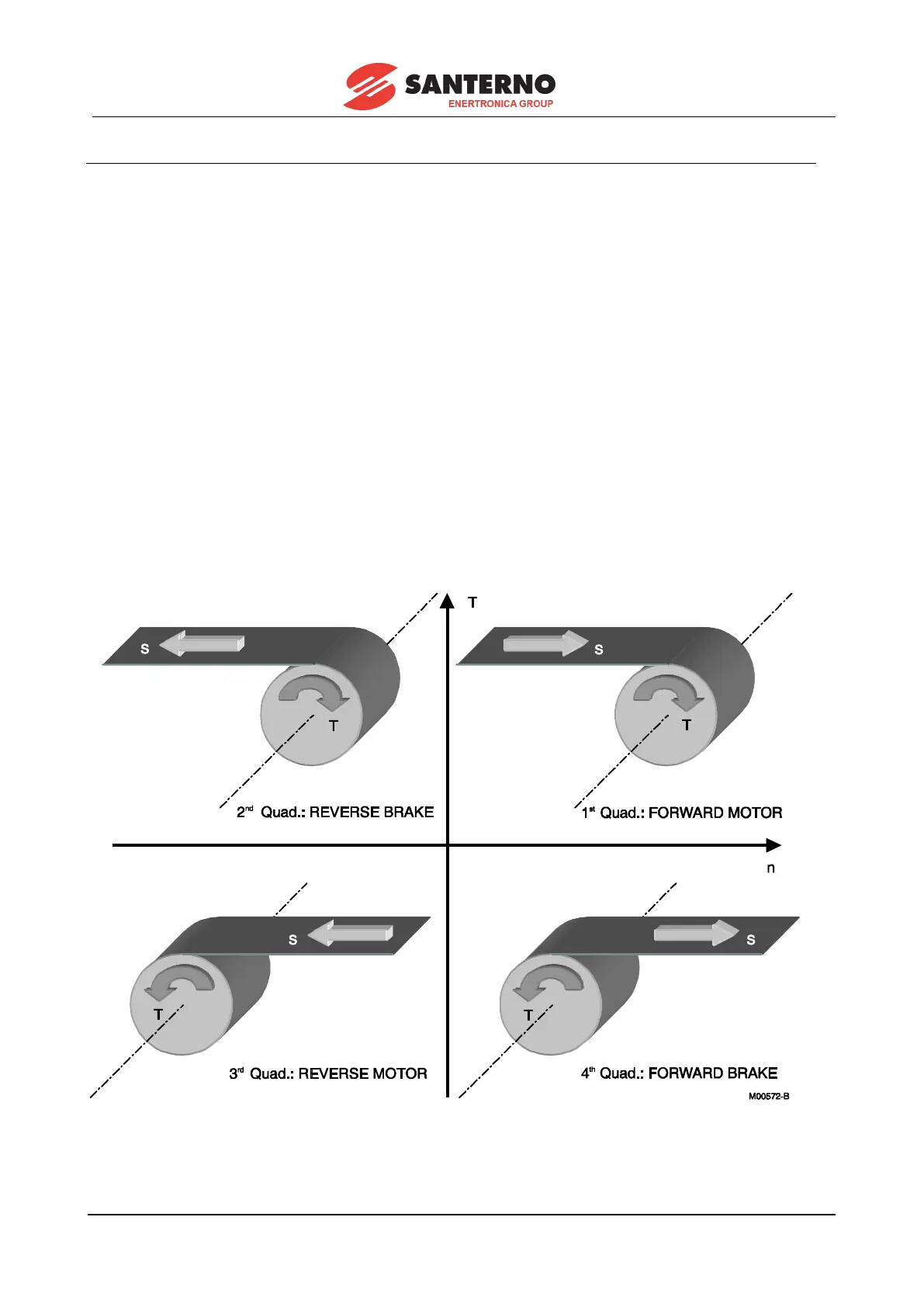
The operation quadrants are defined in Cartesian coordinates with speed (n) / torque (T). The “forward”
direction is associated with positive speeds (feedback polarity); bridge “A” is the one which causes motor
clockwise rotation (seen sideways in the drawing) with no external torque.
The four quadrants may be identified as follows:
1st Quadrant: Forward direction with motor torque (positive speed feedback and bridge A on).
2nd Quadrant: Reverse direction with braking torque (negative speed feedback and bridge A on).
3rd Quadrant: Reverse direction with motor torque (negative speed feedback and bridge B on).
4th Quadrant: Forward direction with braking torque (positive speed feedback and bridge B on).
Parameters C060 ... C063 allow the quadrant enabling / disabling.
Default operation for DCREG2 is enabled for quadrant 1 and 2. Operation in quadrant 3 and 4 cannot be
enabled (only bridge “A” is in).
On the other hand, DCREG4 default operation is assigned to all four quadrants (both bridge “A” and “B”
are in).
Whenever a braking torque is produced, an energy regeneration takes simultaneously place from the load
to the mains.
What we said above is shown in the following figure, where we suppose that the motor is fit to the axle of
a reel winding or unwinding some tensioned material.
 Loading...
Loading...