4.3.4.3 Combining beam coding and reversed direction of transmission
To prevent a mutual interference in the case of more than two neighboring systems,
be
am coding and reversed direction of transmission can be combined.
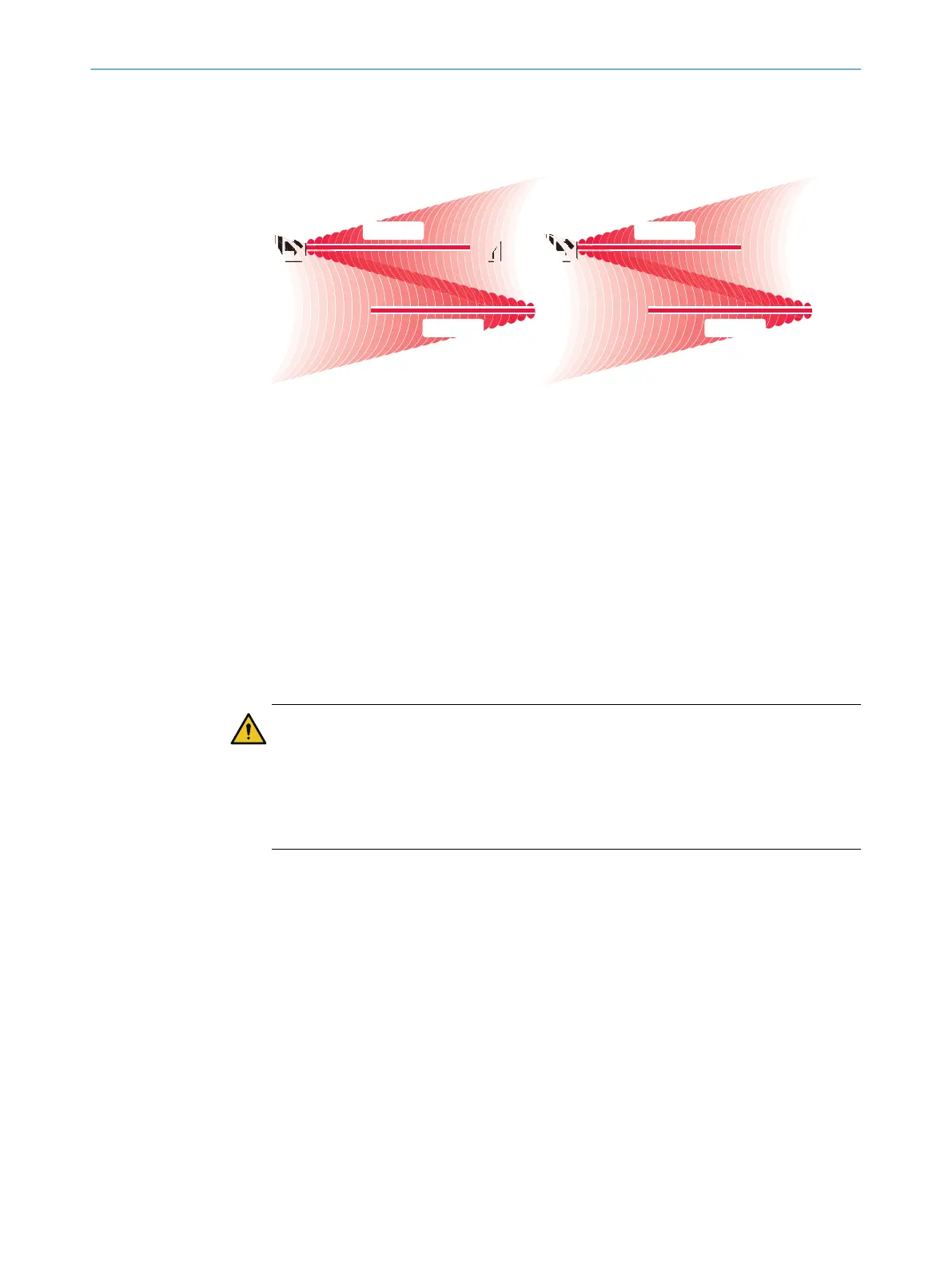
Figure 17: Trouble-free operation of 4 neighboring systems due to beam coding and reversed
dir
ection of transmission
In the figure, the beam coding of the systems arranged next to each other is different.
The direction of transmission of the systems arranged on top of each other is reversed.
This prevents the systems from interfering with each other.
4.4 Integration in electrical control
Overview
T
his chapter contains important information about integration in the electrical control.
Information about the individual steps for electrical installation of the device: see
"Electrical installation", page 49.
Important information
DANGER
H
azard due to lack of effectiveness of the protective device
In the case of non-compliance, it is possible that the dangerous state of the machine
may not be stopped or not stopped in a timely manner.
b
Make sure that the following control and electrical requirements are met so that
the product can fulfill its protective function.
Requirements for use
T
he output signals of the protective device must be analyzed by downstream controllers
in such a way that the dangerous state of the machine is ended safely. Depending
on the safety concept, signal evaluation is carried out e.g. with safety relays or with a
safety controller.
•
It mus
t be possible to electrically influence the control of the machine
•
The electrical control of the machine must meet the requirements of IEC 60204-1
•
When using a safety controller, different signal levels of both OSSDs must be
detected depending on applicable national regulations or required reliability of the
safety function. The maximum discrepancy time tolerated by the controller must
be selected according to the application.
•
The OSSD1 and OSSD2 output signals must not be connected to each other
•
In the machine controller, the signals of both OSSDs must be processed sepa‐
rately
4 P
ROJECT PLANNING
30
O P E R A T I N G I N S T R U C T I O N S | deTec4 8027140/2021-11-04 | SICK
Subject to change without notice