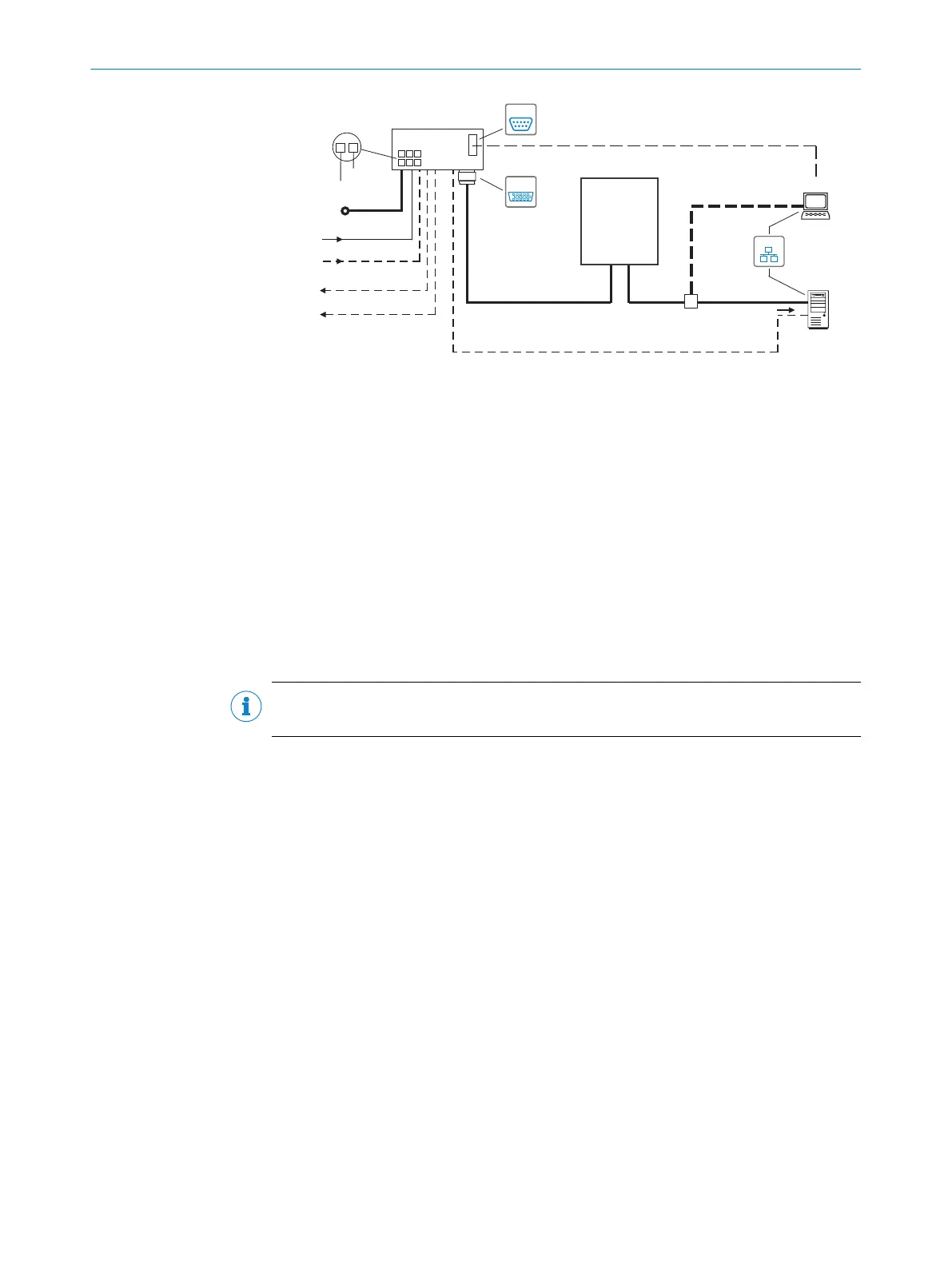
“Ethernet” (Host 2)
Input 2
(e.g. incremental encoder)
Input 1
(e.g. external read cycle)
Output 1
(e.g. LED)
Output 2
(e.g. LED)
CLV6xx
“Serial RS-232/RS-422/485” (Host 1), alternative to Ethernet host port
CDB620/CDM420
SerialSerial
Configuration
Diagnostics
SOPAS ETSOPAS ET
SerialSerial
“Power/Serial Data/CAN/I/O”
(Aux 1, Host 1)
...
...
1
2
DC 18 V ... 30 V
GND
HOST
PC
Further data
processing
“Serial RS-232” (Aux 1), alternative to Ethernet Aux port
“Ethernet” (Aux 2)
DC 18 V ... 30 V
Switching inputs/outputs = digital
“Ethernet”
Reading result
EthernetEthernet
Figure 7: Facilities for connecting CLV63x-65x, Ethernet version
3.2.3.1 Object trigger control
The device needs a suitable external signal (trigger source) as notification of an object
being in the reading field to start an object-related read process. As standard, the start
signal is issued via an external read cycle sensor (e.g. photoelectric sensor). As soon as
an object has passed the reading cycle sensor, a time window (“reading interval”) is
opened in the device for the reading process.
Alternatively, a command triggers the read process via a data interface or the
SICK SENSOR network. In auto pulse mode, the device internally generates the reading
gate itself with an adjustable clock ratio.
The read cycle can be terminated in various ways. In the event of external triggering,
this is carried out via the read cycle source or a command, or internally via a timer or an
evaluation condition that needs to be met.
NOTE
The SOPAS-ET configuration software can be used to configure the trigger source:
3.2.3.2 Auto focus function (for CLV65x only)
The auto focus function allows the device to conduct the distance detection for the
object without help from external sensors and to set the focus position independently.
In order to do this, the device measures the distance from the object in its field of
vision, uses this to create a distance profile internally and positions the focus on the
object.
The auto focus function works in the “Difference to background” mode. The device is
taught the distance profile of the background of its vision area without an object. Then
the device focuses on the object, which it detects by establishing the difference from
the background. The application is carried out e.g. with free vision of the object with
restriction from structures which permanently protrude into the read level. Only one
object with bar code(s) is in the reading field for each read cycle.
The distance profile of the background that is created can be displayed in the SOPAS ET
configuration software. The definition of the auto focus area is carried out by selecting
the aperture angle, the auto focus area and for line scanners with oscillating mirror
also by limiting the oscillation amplitude (the angle of deflection). It is possible to spec‐
ify, among other things, the park position (preferred position) of the focus position, from
which refocusing is carried out for each reading, for the device and a temporal and/or
spatial delay time (timeout/hysteresis).
3 PRODUCT DESCRIPTION
18
O P E R A T I N G I N S T R U C T I O N S | CLV63x, CLV64x, CLV65x 8019588/2017-01-20 | SICK
Subject to change without notice