RangeReturn val-
ues
Arguments
a
Us-
able
in
Run
mode
Identi-
fier
Com-
mand
Description
int
max*1000
[0, 640000]
a
For information about tools indexing see Section B.2.4, “Tools indexing” (page 54)
b
When creating the circle without search, the max diameter that can be set is the diameter that keeps the circle
within the configured FOV. E.g. if using the full resolution FOV and placing the circle in the center of the image, the
max value without search can be set to 480 pixels.
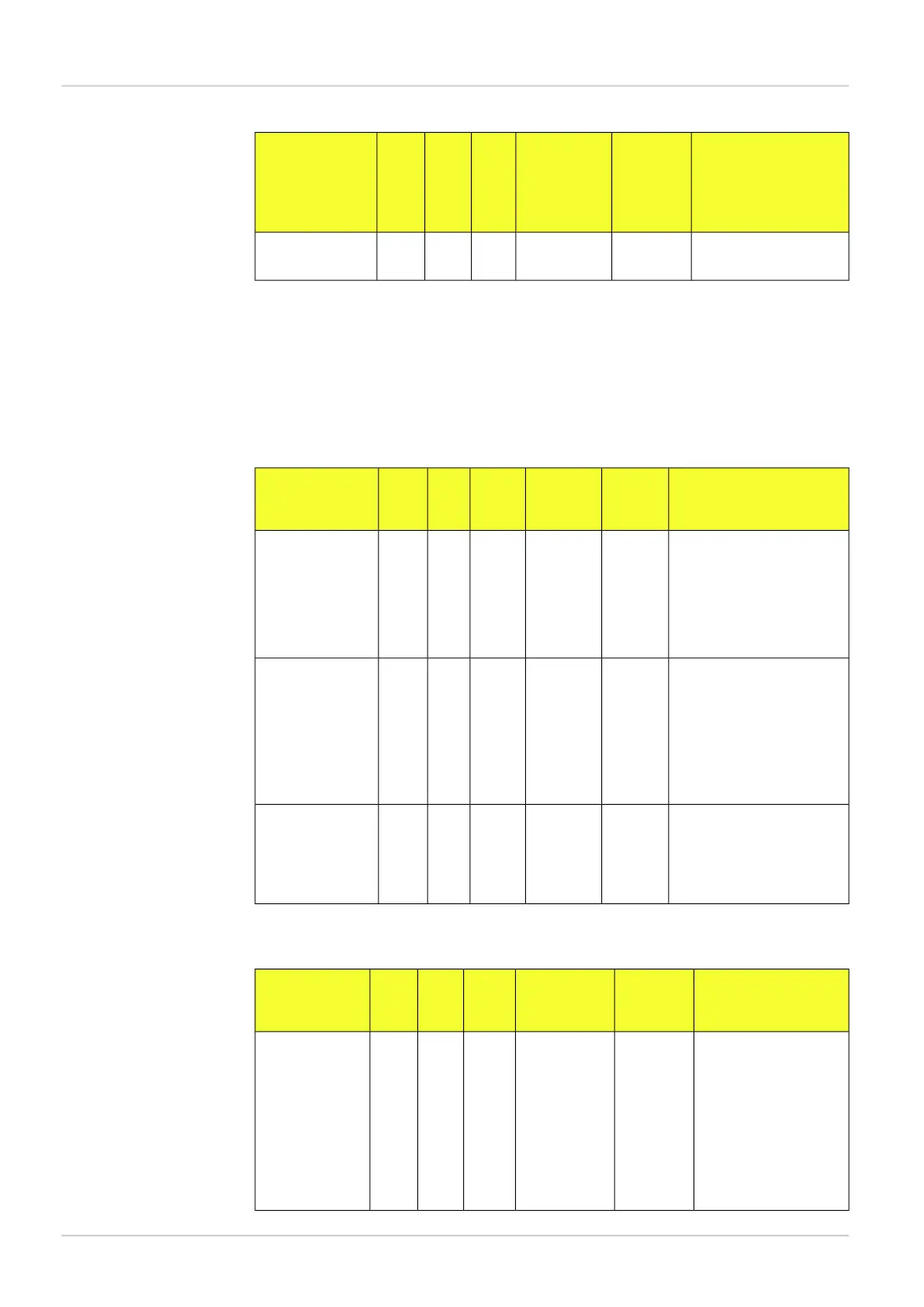
The table below lists the move commands for the Pixel counter, Edge pixel counter, Pattern,
Edge, and Circle tools.
Table B.16 Command channel functions - Common commands for Pixel counter, Edge
pixel counter, Pattern, Edge, and Circle tools
RangeReturn
values
Argu-
ments
a
Usable
in Run
mode
Iden-
tifier
Com-
mand
Description
[0, 63],
x, y = pixels, angle = de-
grees. Arguments are delta
values. These can be negat-
ive as compared to the ori-
gin.
int index,
int x, int y,
int angle
No86sINTMove and rotate
inspection
[0, 63],
x, y = pixels, angle = de-
grees. Return values are
absolute values for the
center of the ROI. These
can be negative as com-
pared to the origin.
-
int x, int
y, int
angle
int indexYes86gINTGet inspection po-
sition and rotation
[0, 63],
Number of pixels in the ref-
erence object's ROI
-
int pixels
int indexYes87gINTGet number of
pixels in ROI, (Val-
id for Pixel
Counter and Edge
Pixel Counter)
a
For information about tools indexing see Section B.2.4, “Tools indexing” (page 54)
Table B.17 Command channel functions - Distance
RangeReturn val-
ues
Arguments
a
Usable
in Run
mode
Identi-
fier
Com-
mand
Description
[0, 63],int index,No170sINTChange distance
measurement
thresholds
[0, VGA image diagon-
al]
int min*1000
int max*1000
[0, VGA image diagon-
al]
int unit
[0, 1] (0 = pixels, 1 =
millimeters)
min ≤ max
8015726/2013-11
©SICK AG • Advanced Industrial Sensors • www.sick.com • All rights reserved
Subject to change without notice
68
Reference Manual
Command channel
Appendix
Inspector PIM