3.4 Principle of operation
3.4.1 Measurement principle
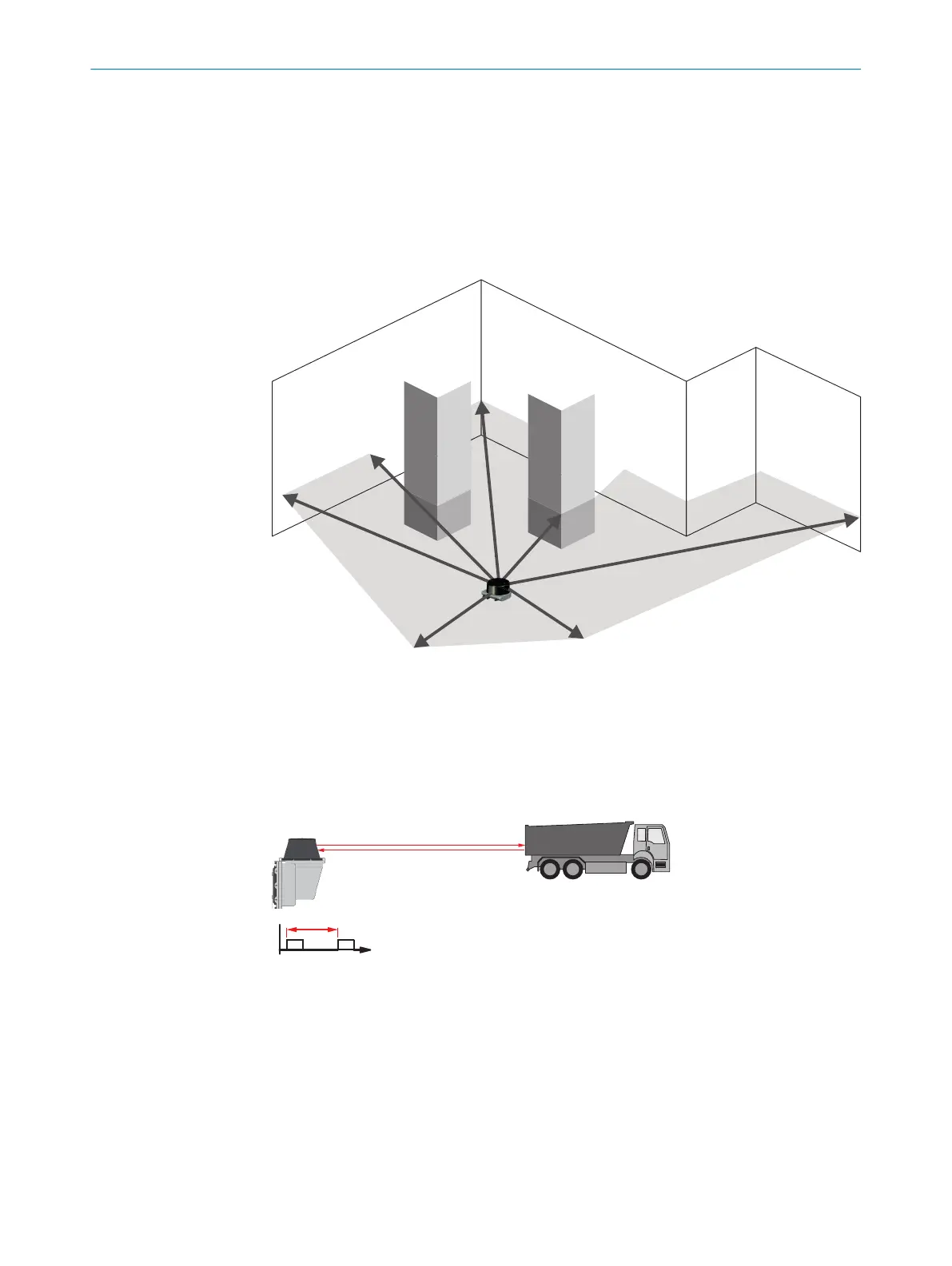
The device is an optoelectronic LiDAR sensor that contactlessly scans the outline of its
surroundings with the help of laser beams. The device measures its surroundings in
two-dimensional polar coordinates, relative to its measurement origin. This is marked
by a circular indentation in the center of the optics cover. If a laser beam strikes an
object, the position of that object is determined in terms of distance and angle.
Figure 2: LiDAR sensor with one scan plane
3.4.2 Range finding
The device emits beams pulsed by a laser diode. If the laser beam is reflected by an
object, the reflected beam is received by the sensor.
The distance to the object is calculated on the basis of the time that the pulsed light
beam requires to be reflected and received by the sensor.
1
Emitted pulse
2
Receive pulse
3.4.3 Direction measurement
The scanner head rotates at a selectable frequency of 5 to 15Hz. A laser pulse and
thus a distance measurement is triggered continuously after each angle increment.
In interlaced mode, individual scans are taken offset at an angle one to the other with
the maximum resolution that is technically possible. Combining the scans externally
enables a higher overall resolution to be achieved.
PRODUCT DESCRIPTION 3
8016506/1G07/2020-11-08 | SICK O P E R A T I N G I N S T R U C T I O N S | LD-LRS
11
Subject to change without notice