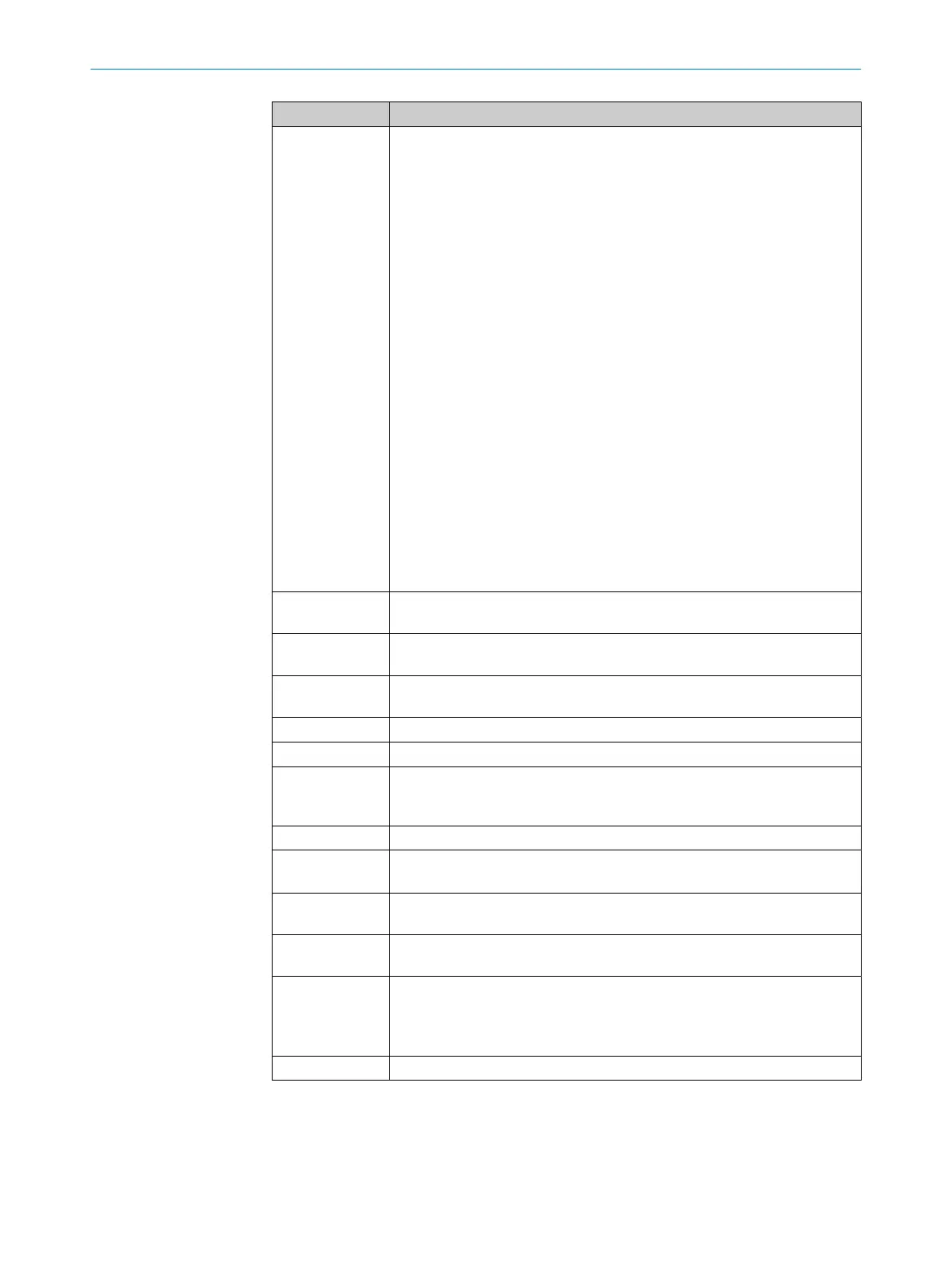
Parameter(s) Description
error
For most responses this is the error code returned by the PLOC2D sensor:
9000 = Invalid parameter. At least one input parameter is invalid.
9100 = The image acquisition failed.
9101 = The image could not be stored on the SD-card.
9200 = No valid image found.
9201 = PLOC2D sensor not calibrated.
9202 = PLOC2D sensor not aligned.
9203 = Job not valid.
9301 = Calibration target not found.
9400 = Alignment failed.
9401 = Alignment target not found.
9402 = Verify alignment failed.
9600 = Locate failed.
9601 = Locate failed. Score too low.
9603 = Locate failed. Requested match not found.
9604 = Locate failed. Multiple work planes.
9607 = Locate failed. Gripper clearance collision.
9810 = File not found. The source file could not be opened for reading.
9820 = Connection to remote server failed.
9995 = Number of locate attempts exceeded in demonstration mode.
9996 = Unsupported operation.
9997 = Operation timed out.
9999 = An unknown error occurred.
For some PLOC2D responses, this parameter name also means reprojection
error value (in pixels).
exposure
The conveyor tracking index indicating the image capture order. Applicable
when locating multiple jobs with different exposure settings.
identified
A space-separated list of identified job IDs. Used for the Run.Locate
response.
job
A space-separated list of job IDs. Can be a single job ID. All jobs must be
defined using the same work plane.
match
The index of the current match.
matches
The number of matches found.
pose
The slot index of the pose used for calculating the sensor position on the
robot arm. Up to 32 poses can be used. The character "?" can be used to get
the next available slot instead of keeping track of used pose slots.
reason
An optional text string that will be visible in the system log.
results
A comma-separated list of results, where each result consists of
match,job,x,y,z,r1,r2,r3,scale,score,exposure.
scale
Size of the current part compared to the reference part. If scale > 1, it
means that the current part is closer to the sensor than the reference part.
score
Score value (%) for the current result. See "Job configuration", page 47 for
details.
source
Specifies the files to export from the SD card when using the
System.Ftp.Export command.
Specifies the job folder name on the FTP server, when using the
Job.Import command.
time
Part localization time.
OPERATION 7
8020736/1K3Z/2023-06 | SICK O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1
65
Subject to change without notice