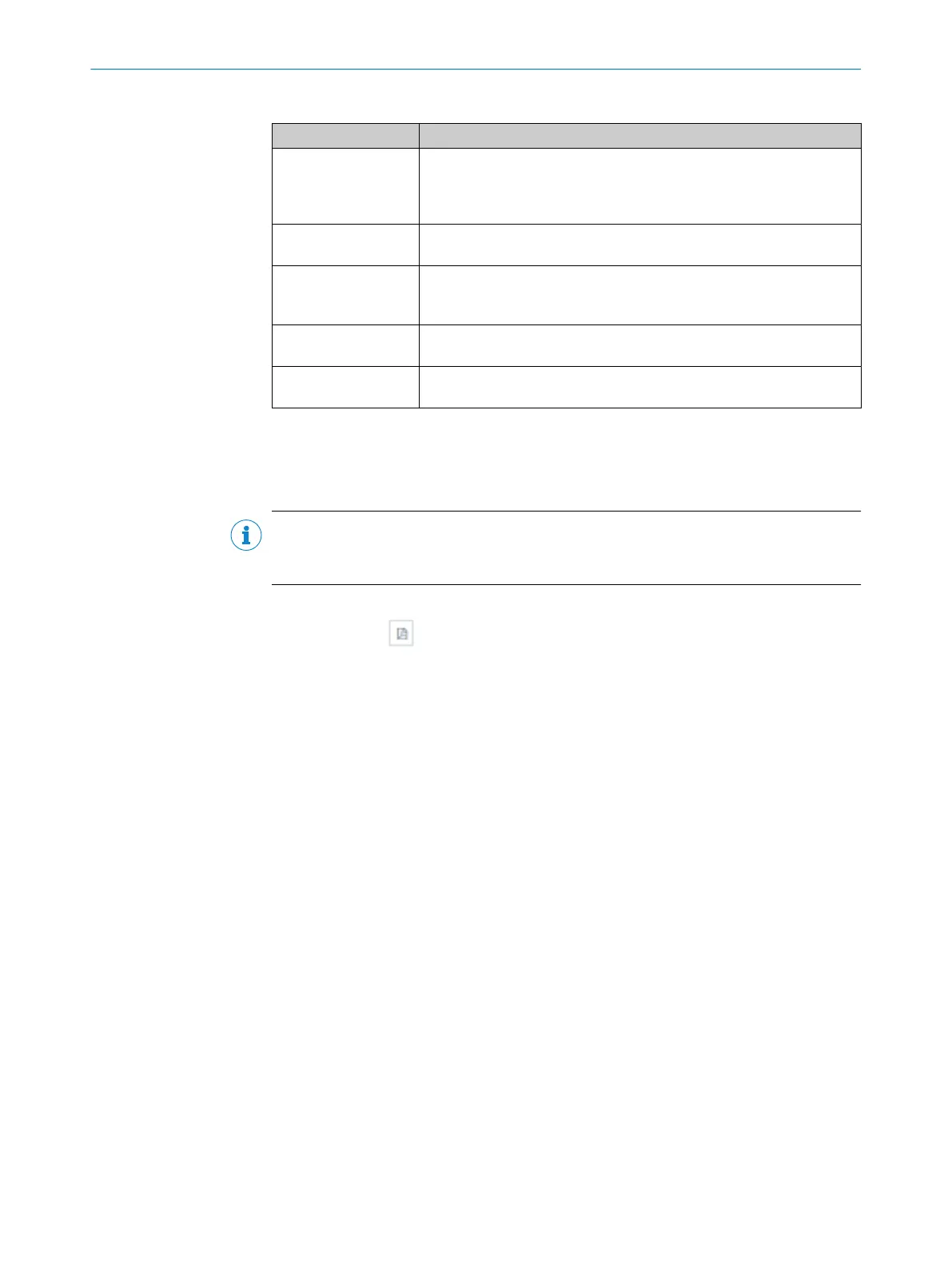
Table 1: Result parameters
Parameters Description
Reprojection error This parameter should be as low as possible. The reprojection error
depends on the coverage; a higher coverage normally yields a higher
reprojection error. As a general rule, a reprojection error < 1 is recom‐
mended.
Coverage This parameter indicates how much of the field of view has been cov‐
ered by the detected calibration marks.
Quality This parameter should be as high as possible, preferably > 1. To obtain
a good calibration, it is important to find a good balance between high
coverage and low reprojection error.
Focal length This parameter is the focal length estimated by the system. It should
not be very far from the specification of the lens.
Optical image center This parameter represents the pixel coordinates of the estimated opti‐
cal center. It should be close to the actual center of the image.
7.2.3 Hand-eye alignment
The purpose of this workflow step is to align the sensor and robot coordinate systems.
You will be using an alignment target. User level Maintenance or higher is required.
NOTE
For best performance it is recommended to use one of the official targets, see PLOC2D
version accessories at www.sick.com/PLOC2D.
For evaluation purpose, it is possible to download a printable PDF file of the selected
target by clicking in the user interface, Alignment page. The target image must be
printed at 100% scale and glued to a flat non-flexible surface.
The alignment target is illustrated in figure 17. Note that the illustration is not to scale
and can not be used for alignment.
7 OPERATION
42
O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1 8020736/1K3Z/2023-06 | SICK
Subject to change without notice