Byte(s) Parameter Interpretation
48-51
z
A 32-bit signed integer representing the z value of the robot frame in
thousands of a millimeter.
52-55
r1
A 32-bit signed integer representing the first rotation of the robot frame
in thousands of a degree.
56-59
r2
A 32-bit signed integer representing the second rotation of the robot
frame in thousands of a degree.
60-63
r3
A 32-bit signed integer representing the third rotation of the robot
frame in thousands of a degree.
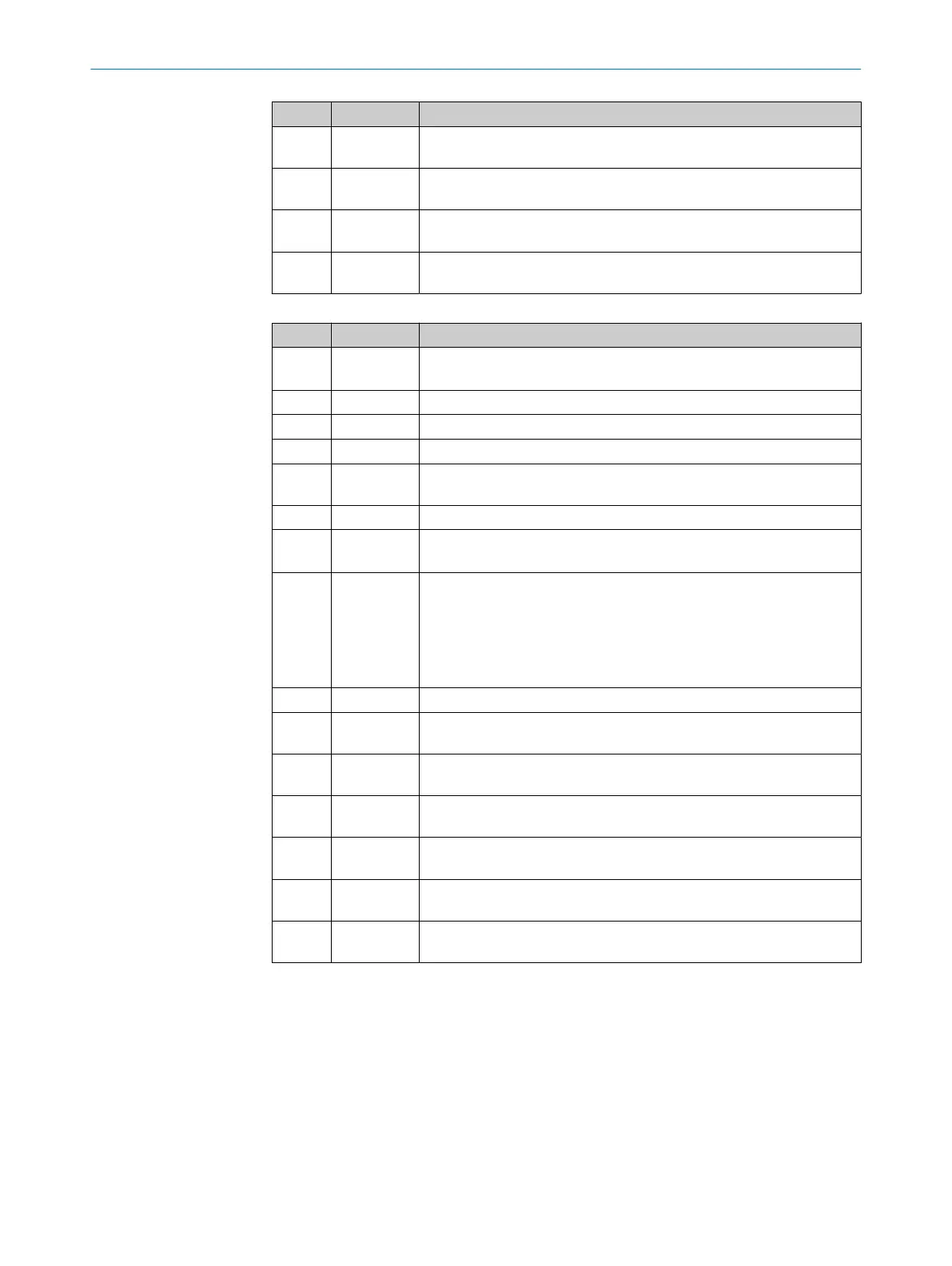
Table 13: Result data
Byte(s) Parameter Interpretation
0-1
error
A 16-bit unsigned integer representing the error code, see the parame‐
ter error in table 5.
2-3
job
A 16-bit unsigned integer describing the ID of a job.
4
alignment
An 8-bit unsigned integer representing the alignment.
5
match
An 8-bit unsigned integer representing the ID of the reported match.
6
matches
An 8-bit unsigned integer representing the number of matches availa‐
ble in the image.
7
score
An 8-bit unsigned integer representing the score of a match.
8
exposure
An 8-bit unsigned integer representing the exposure index in the
response from Run.Locate.
9
frameType
8-bit unsigned value describing how to interpret the frame in bytes
40-63.
0 = Final frame
1 = Correction frame
2 = HandEye align result
4 = Alignment verification diff
10-39 Not used
40-43
x
A 32-bit signed integer representing the x value of the robot frame in
thousands of a millimeter.
44-47
y
A 32-bit signed integer representing the y value of the robot frame in
thousands of a millimeter.
48-51
z
A 32-bit signed integer representing the z value of the robot frame in
thousands of a millimeter.
52-55
r1
A 32-bit signed integer representing the first rotation of the robot frame
in thousands of a degree.
56-59
r2
A 32-bit signed integer representing the second rotation of the robot
frame in thousands of a degree.
60-63
r3
A 32-bit signed integer representing the third rotation of the robot
frame in thousands of a degree.
12.2.4 Workflow (using control bits)
This applies when the Protocol version "Using control bits" is selected in "Fieldbus config‐
uration", page 55.
The communication workflow when using command control bits is described in the
following procedure and illustration.
Initially, all control bits and data fields are assumed to be 0 by the RG system.
APPENDIX 12
8020736/1K3Z/2023-06 | SICK O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1
81
Subject to change without notice