Byte(s) Parameter Interpretation
56-59
r2
A 32-bit signed integer representing the second rotation of the robot
frame in thousands of a degree.
60-63
r3
A 32-bit signed integer representing the third rotation of the robot
frame in thousands of a degree.
12.2.2 Workflow
This applies when the default Protocol version, "Using telegram ID", is selected in "Field‐
bus configuration", page 55.
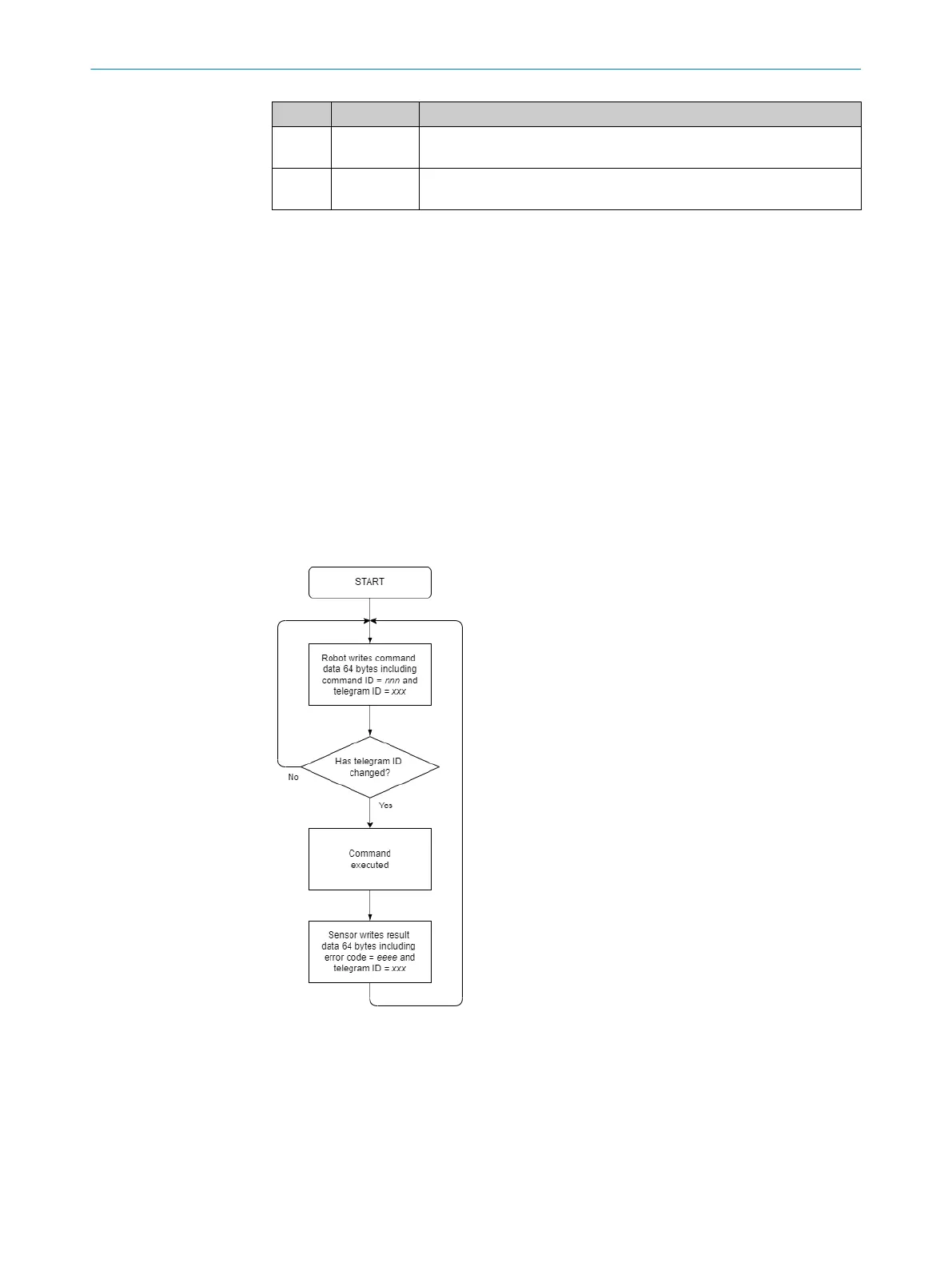
The suggested communication workflow is described in the following procedure and
illustration.
1. The robot writes command arguments to the command data field (64 bytes),
see "Diagnostics", page 56. Which parameters are written may differ between
commands, but the layout of the data field is always the same.
°
Command arguments must include a command ID (see table 7), arguments
and a telegram ID.
2. The RG system attempts to execute the command when the telegram ID is
updated from the robot.
3. The robot waits for the result data to be updated with the specified telegram ID.
✓
Command is successful if error code = 0000.
See table 5 for a list of other error codes.
12.2.3 Register layout (using control bits)
This applies when the Protocol version "Using control bits" is selected in "Fieldbus config‐
uration", page 55.
The data is divided into four sections:
•
Command control bits
•
Result control bits
APPENDIX 12
8020736/1K3Z/2023-06 | SICK O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1
79
Subject to change without notice