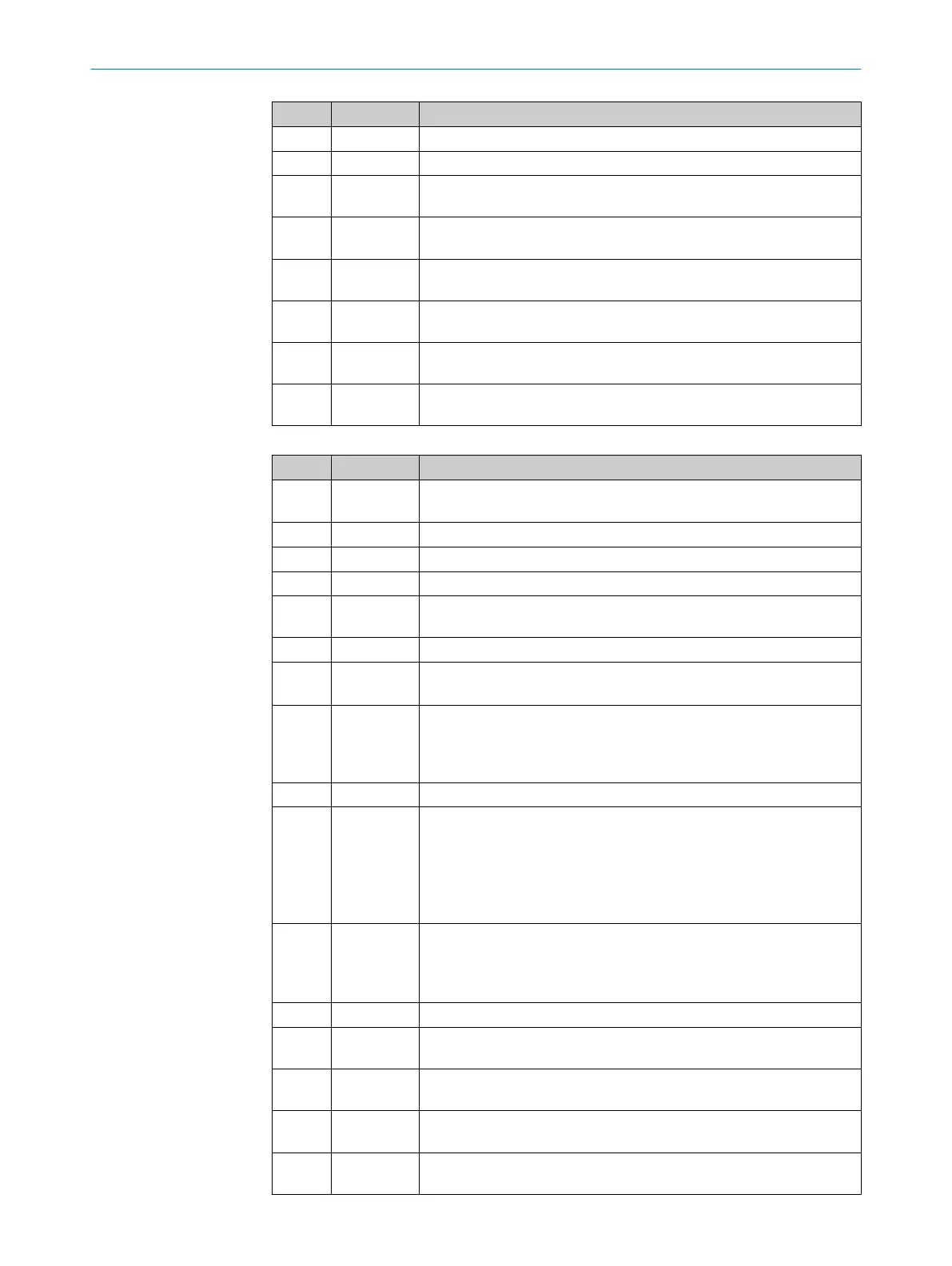
Byte(s) Parameter Interpretation
6-7
telegram
16-bit unsigned integer representing the telegram ID.
8-39 Not used
40-43
x
A 32-bit signed integer representing the x value of the robot frame in
thousands of a millimeter.
44-47
y
A 32-bit signed integer representing the y value of the robot frame in
thousands of a millimeter.
48-51
z
A 32-bit signed integer representing the z value of the robot frame in
thousands of a millimeter.
52-55
r1
A 32-bit signed integer representing the first rotation of the robot frame
in thousands of a degree.
56-59
r2
A 32-bit signed integer representing the second rotation of the robot
frame in thousands of a degree.
60-63
r3
A 32-bit signed integer representing the third rotation of the robot
frame in thousands of a degree.
Table 9: Result data
Byte(s) Parameter Interpretation
0-1
error
A 16-bit unsigned integer representing the error code, see the parame‐
ter error in table 5.
2-3
job
A 16-bit unsigned integer describing the ID of a job.
4
alignment
An 8-bit unsigned integer representing the alignment.
5
match
An 8-bit unsigned integer representing the ID of the reported match.
6
matches
An 8-bit unsigned integer representing the number of matches availa‐
ble in the image.
7
score
An 8-bit unsigned integer representing the score of a match.
8
exposure
An 8-bit unsigned integer representing the exposure index in the
response from Run.Locate.
9
frame
type
8-bit unsigned value describing how to interpret the X Y Z R1 R2 R3
frame in bytes 40-63.
0 = Measurement frame
2 = Alignment frame
10-11
telegram
16-bit unsigned integer representing the telegram ID.
12
runtime
status
8-bits representing the current state in the command workflow.
0: READY = The device is ready to accept a new command.
1: QUEUE = At least one command is waiting to be executed.
2: PROC = A command is being executed.
3: OK = The most recently executed command was successful.
4: NOK = The most recently executed command returned an error.
13
system
status
8-bits representing the current state in the command workflow.
0: HEARTBEAT = Periodic heartbeat to signal that the device is alive.
1: ERROR = System error. Device should be restarted.
2: CONNECTED = Device is connected to a PLC (or emulator).
14-39 Not used
40-43
x
A 32-bit signed integer representing the x value of the robot frame in
thousands of a millimeter.
44-47
y
A 32-bit signed integer representing the y value of the robot frame in
thousands of a millimeter.
48-51
z
A 32-bit signed integer representing the z value of the robot frame in
thousands of a millimeter.
52-55
r1
A 32-bit signed integer representing the first rotation of the robot frame
in thousands of a degree.
12 APPENDIX
78
O P E R A T I N G I N S T R U C T I O N S | PLOC2D 4.1 8020736/1K3Z/2023-06 | SICK
Subject to change without notice