More user manuals on ManualsBase.com
09.95 12 Functional Descriptions
12.30.4 Activating/deactivating the master/slave torque compensation control
For the master, function generator operation is also permitted in the SERVO and in the
SIMODRIVE 611D (start-up functions). Measurement of the position control loop (SERVO) is
made with the speed and torque coupling active. With measurement functions in the
SIMODRIVE 611D (speed and current control loop), however, only the torque compensation
controller is active. Its output must therefore be connected to the slave (bit 5 of MD
1812*/523* = 1), if measurement is performed with offset > 0.
As an alternative to the start-up functions, it is possible to deactivate the slave operation as
well and configure a GI actual-value coupling instead. The function generator operation is also
permitted for GI leading axes.
12.30.5 Response in the event of an error
In error states (alarms with request for "correction") in the master and/or slave, both drives
must be deactivated together otherwise one of them might attempt to output all the required
torque by itself. In this case, distortion or torsion in the workpiece would be avoidable. The
drives are shut down via SERVO-internal communication in the IPO cycle.
The way in which deactivation is performed can be determined by the user using the familiar
delay times:
If torqueless operation is to be activated immediately, the "OFF delay for servo enable"
(MD 156) and "Delay servo enable" (MD 1224*) must be set to 0. The global MD 156 only
applies if the axial MD 1224* is 0 and must therefore be set to 0. In this case, the servo
enables of the drive are cancelled immediately. To prevent the drive performing regenerative
braking, the drive machine data 1404 must be set to 0. The axis then coasts to rest.
If active braking is only to begin after a certain delay (with the torque of the still intact slaves or
of the master), this time must be parameterized to be the same for all slaves and for the
master in MD 1224*. It is up to the user to do this.
On spindles there is an option of braking the speed setpoint via a ramp and then disabling the
controller. Here too, the user must parameterize identically for all spindles of a master/slave
grouping.
Note:
"Extended stopping and retracting" (ESR), if programmed, cannot be taken into account for
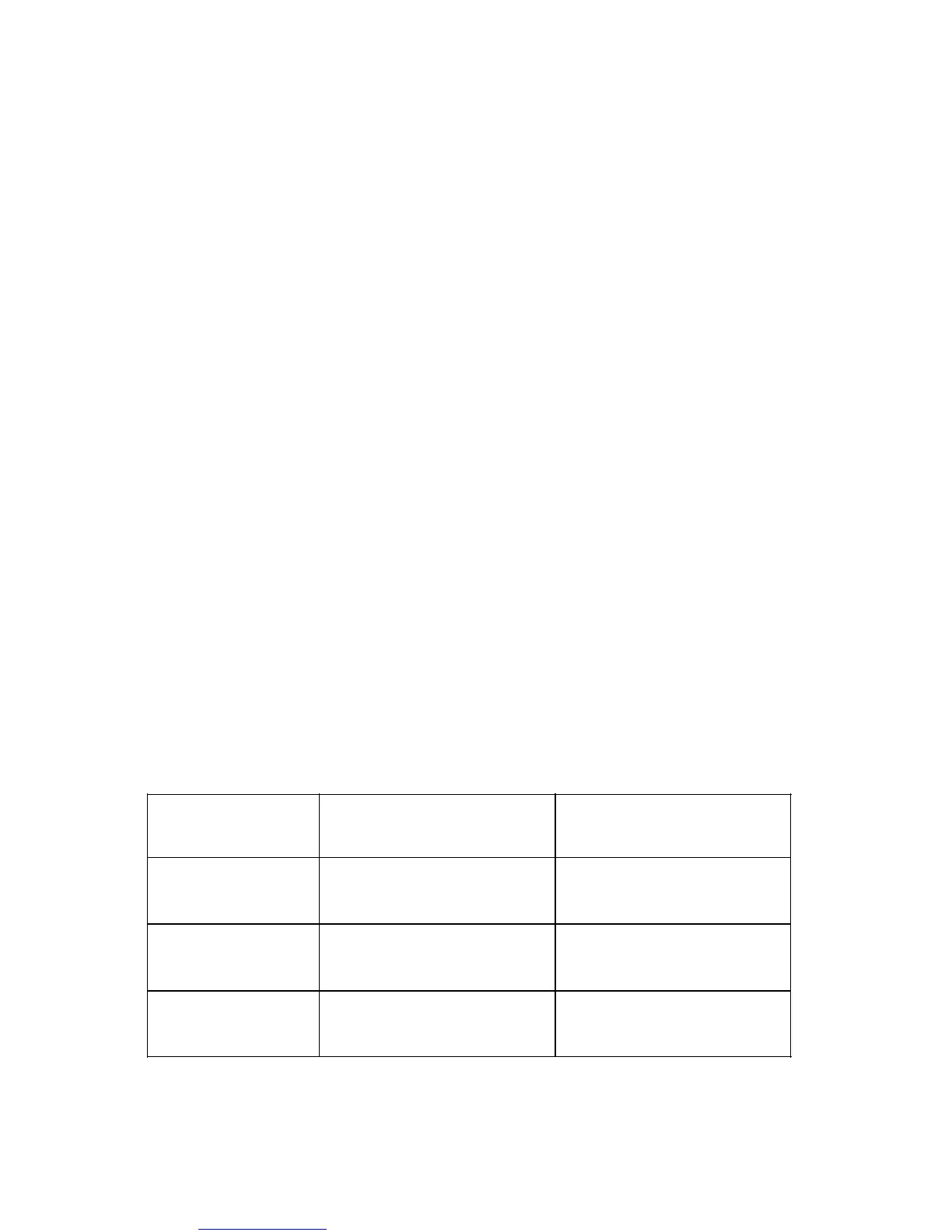
the reason described above as soon as one axis of a master/slave grouping fails. The following
table shows an overview of the alarm responses:
Error occurs:
1.) Normal functionality without
ESR
2.) ESR active for master and
slave
Master: Immediate initiation of follow-up
control with the parameterized
stopping times
Immediate initiation of follow-up
control with the parameterized
stopping times
Slave: Immediate initiation of follow-up
control with the parameterized
stopping times
Immediate initiation of follow-up
control with the parameterized
stopping times
Other axis in the mode
group:
Immediate initiation of follow-up
control with the parameterized
stopping times
Master + slave: configured
ESR, master/slave is retained.
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50
12–309
SINUMERIK 840C (IA)
 Loading...
Loading...






