More user manuals on ManualsBase.com
09.95
Siemens AG 2001 All Rights Reserved 6FC5197–jAA50
9–48
SINUMERIK 840C (IA)
9.5.3.2 Installation with adaptation characteristic
If the compensation is acceleration dependant, a characteristic must be determi-
ned in a second stage.
The required compensation amplitudes for different radii and velocities are deter-
mined, the effect of the compensating amplitudes checked in a circularity test and
the optimum compensation amplitudes logged.
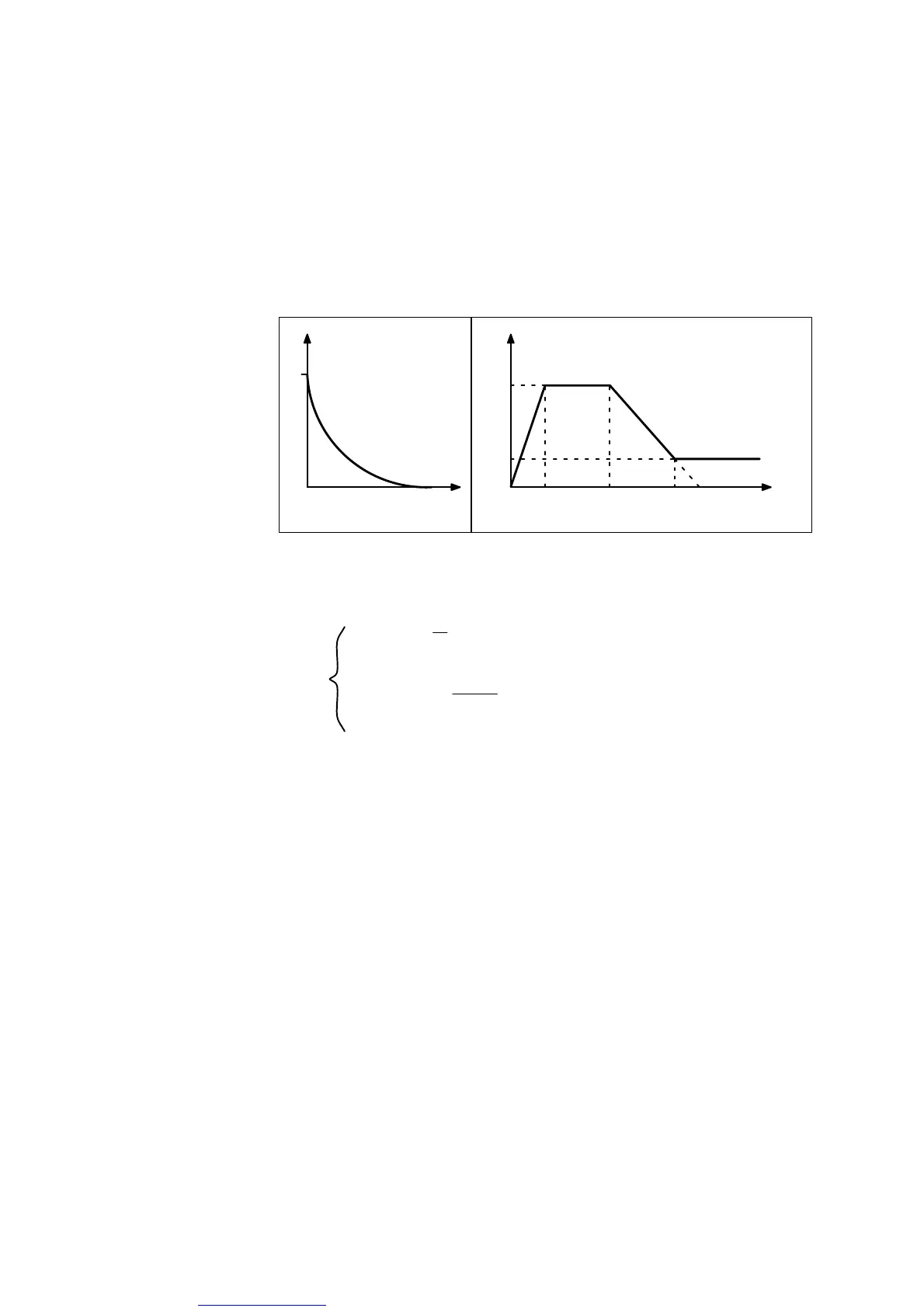
The following characteristic is used for the adaptation:
Dn
t
Dn
max
Dn
min
12 3 4
a
3
a
’3
a
1
a
2
Acceleration
NC MD 12480 NC MD 12520
Minimum amplitude
NC MD 12400
NC MD 12440
Max. amplitude NC MD 12320
Fig. 9.25
A distinction is made between four ranges in the characteristics:
for a < a
1
for a
1
a a
2
for a
2
< a < a
3
for a
3
a
Dn =
Dn
max
Dn
max
Dn
max
Dn
min
a
a
1
1 –
a – a
2
a
3
– a
2
The characteristics in Fig. 9.25 are used for the following examples. It is defined
by the values “Maximum compensating amplitude”, “Minimum compensating am-
plitude” and the three acceleration values a
3
, a
2
and a
1
. Considerably more mea-
sured values should be determined as a control, must importantly there should
be a sufficient number of points for high velocities with small radii. The characteri-
stic values are most easily derived from a graphic representation.
The acceleration values are derived from a = v
2
/r from the radius and travel
velocity. The acceleration value can easily be varied using the override switch.
Before entering these acceleration values a
3
, a
2
and a
1
in machine data 1244*,
1248* and 1252*, it may be necessary to convert to the input format of the ma-
chine data ([mm/s
2
] [100 units MS/s
2
] or [10000 units MS/s
2
]).
A monitoring function in the control ensures that incorrect parameterization of the
characteristics for the friction feedforward control are avoided.
The following conditions must be met when entering accelerations a
3
, a
2
and a
1
for the characteristic.
a
1
< a
2
< a
3
If this condition is not met, parameter error 328 is output. The user should there-
fore follow the input sequence a
3
, a
2
and then a
1
when entering the acceleration
values. Parameter error 328 is also output if internal formats are exceeded as a
result of calculation errors when determining the accelerations from inputs a
3
, a
2
and a
1
. If this happens, the user must check whether the break points in the
9 Drive Servo Start-Up Application (as from SW 3)
9.5.3 Conventional quadrant error compensation (as from SW 2)
 Loading...
Loading...






