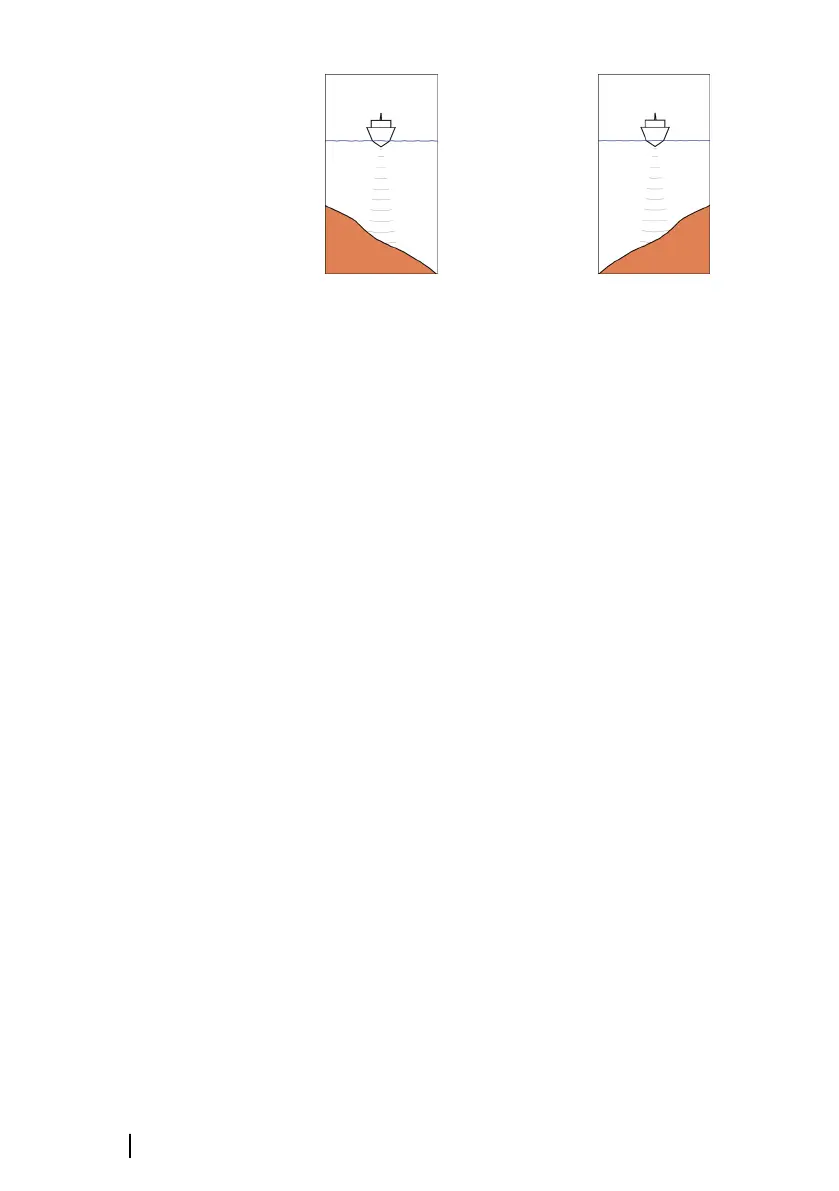
Port option
(depth decreases to port)
Starboard option
(depth decreases to starboard)
• Turn variables:
-
Depth gain. This parameter determines the ratio between
commanded rudder and the deviation from the selected depth
contour. The higher depth gain value the more rudder is
applied. If the value is too small it will take a long time to
compensate for drifting off the set depth contour, and the
autopilot will fail to keep the boat on the selected depth. If the
value is set too high the overshoot will increase and the
steering will be unstable.
-
CCA. The CCA is an angle that is added to or subtracted from
the set course. With this parameter you can make the boat yaw
around the reference depth with s movements. The larger the
CCA the bigger yawing will be allowed. If the CCA is set to zero
there is no S-ing.
- Ref. depth. This is the reference depth for the DCT function.
When DCT is initiated the autopilot reads the current depth
and set this as the reference depth. The reference depth can be
changed when the function is running.
Ú
Note: If depth data is lost during DCT the autopilot will
automatically switch to AUTO mode.
It is recommended to turn ON the AP Depth Data Missing alarm
when using DCT. When this alarm is activated an alarm will be
raised if the depth data is lost during DCT.
Using the autopilot in an EVC system
24
Autopilot modes | AP™ 48 Operator Manual