The following sections describe the settings that can be changed by the user. The settings
are described per autopilot computer.
Installation settings are available in the documentation following the autopilot computers.
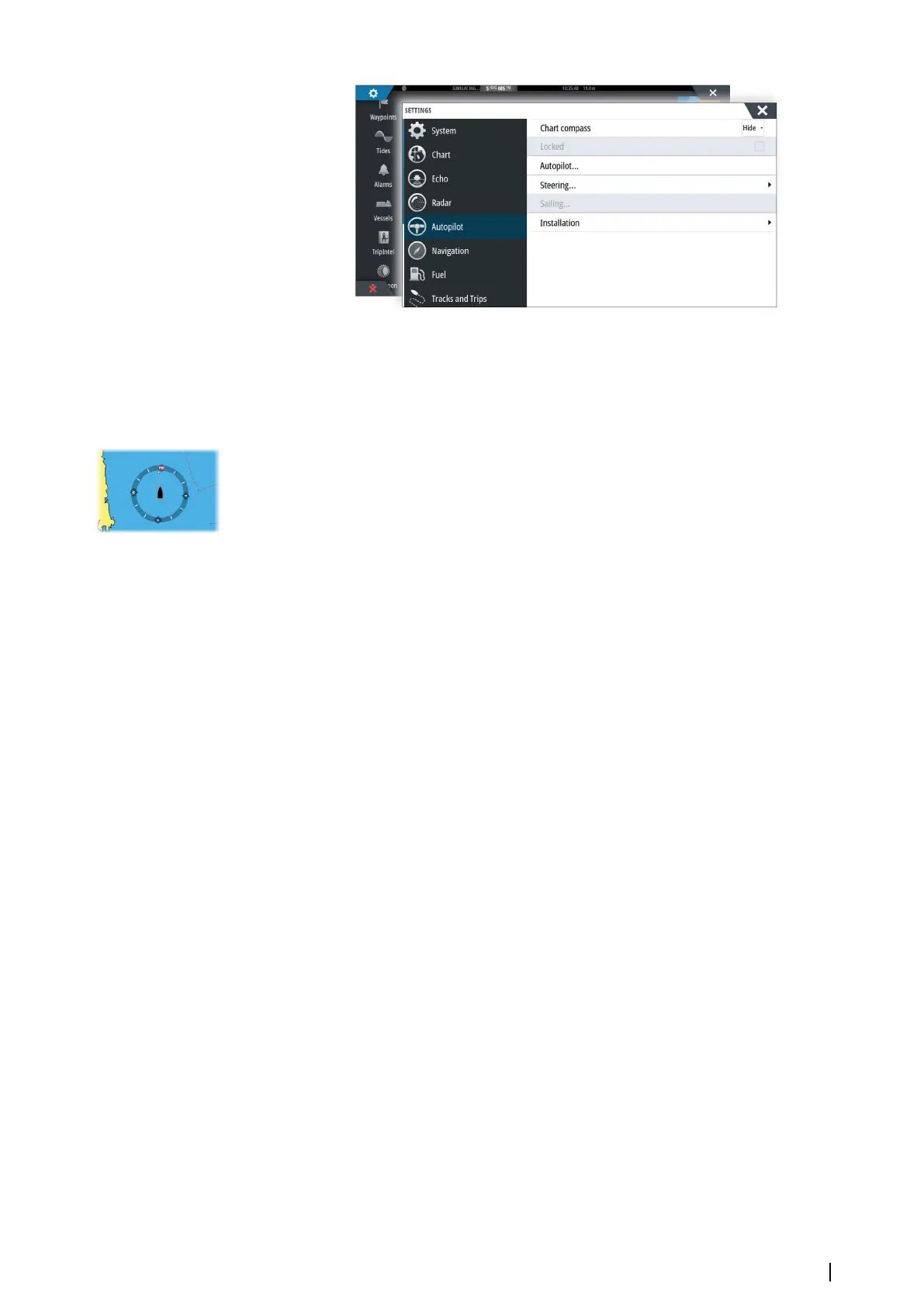
Chart compass
You can select to show a compass symbol around your boat on the chart panel. The
compass symbol is off when the cursor is active on the panel.
Locking autopilot operation from a unit
You can lock a unit to prevent unauthorized operation of the autopilot. When the unit is
locked, it is indicated with a lock symbol and with text in the pop up. No automatic modes
can be selected from a locked display.
Ú
Note: The lock function is not available on a unit which has autopilot control!
If the NSS evo3 is part of an AP24/AP28 system, all other autopilot control units can be locked
for autopilot control from the AP24/ AP28 control unit.
NAC-2/NAC-3 Autopilot computer
Steering (NAC-2/NAC-3)
These options allow for manually changing parameters that were set during the
commissioning of the autopilot computer. For more details, refer to the separate
documentation for the autopilot computer.
• Turn rate: Preferred turn rate used while turning in degrees per minute
• Rudder gain: This parameter determines the ratio between commanded rudder and the
heading error. The higher rudder value the more rudder is applied. If the value is too small
it will take a long time to compensate for a heading error, and the autopilot will fail to
keep a steady course. If the value is set too high the overshoot will increase and the
steering will be unstable.
• Counter rudder: Relation between change in heading error and applied rudder. Higher
counter rudder will reduce applied rudder faster when approaching the set heading
• Autotrim: Controls how aggressively the autopilot will apply rudder to compensate for a
constant heading offset, e.g. when external forces such as wind or current affects the
heading. Lower autotrim will give faster elimination of a constant heading offset
Ú
Note: In VRF mode this parameter controls the time constant of the rudder estimate. A
lower value makes the rudder estimate faster, i.e. that it will more quickly catch up with
the boat's movements.
• Init rudder: Defines how the system moves the rudder when switching from manual
steering to an automatic mode.
- Center: Moves the rudder to zero position
- Actual: Maintains the rudder offset
• Rudder limit: Determines the maximum rudder movement in degrees from midship
position that the autopilot can command the rudder in the automatic modes. The Rudder
Autopilot | NSS evo3 Operator Manual
61