STOBER 10 | Appendix
02/2020 | ID 443025.06
79
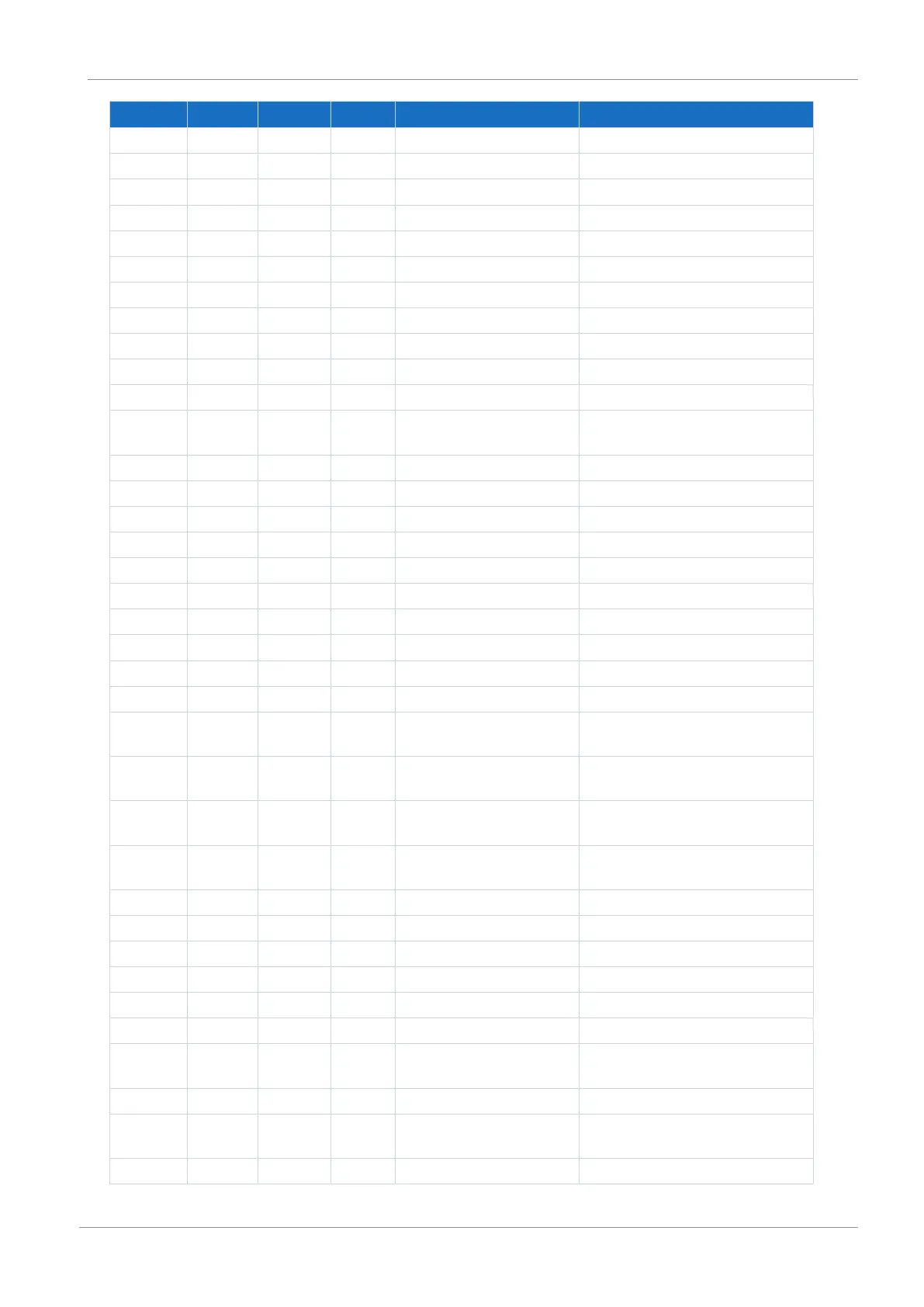
Index Subindex TxPDO RxPDO Name Comment
6091 hex Gear ratio
6091 hex 0 hex — — Highest subindex supported Constant value of 2
6091 hex 1 hex ✓ ✓ Motor revolutions A584[0]
6091 hex 2 hex ✓ ✓ Shaft revolutions A584[1]
6092 hex Feed constant
6092 hex 0 hex — — Highest subindex supported Constant value of 2
6092 hex 1 hex ✓ ✓ Feed A585[0]
6092 hex 2 hex ✓ ✓ Shaft revolutions A585[1]
6098 hex 0 hex ✓ ✓ Homing method A586
6099 hex Homing speeds
6099 hex 0 hex — — Highest subindex supported Constant value of 2
6099 hex 1 hex ✓ ✓ Speed during search for
switch
A587[0]
6099 hex 2 hex ✓ ✓ Speed during search for zero A587[1]
609A hex 0 hex ✓ ✓ Homing acceleration A588
60A3 hex 0 hex — — Profile jerk use A589
60A4 hex Profile jerk
60A4 hex 0 hex — — Highest subindex supported Constant value of 1
60A4 hex 1 hex — ✓ Profile jerk, Profile jerk 1 A590
60B1 hex 0 hex ✓ ✓ Velocity offset A592
60B2 hex 0 hex ✓ ✓ Torque offset A593
60B8 hex 0 hex ✓ ✓ Touch probe function A594
60B9 hex 0 hex ✓ — Touch probe status A595
60BA hex 0 hex ✓ — Touch probe position 1
positive value
A596
60BB hex 0 hex ✓ — Touch probe position 1
negative value
A597
60BC hex 0 hex ✓ — Touch probe position 2
positive value
A598
60BD hex 0 hex ✓ — Touch probe position 2
negative value
A599
60C0 hex 0 hex — ✓ Interpolation sub mode select A600
60C1 hex Interpolation data record
60C1 hex 0 hex — — Highest subindex supported Constant value of 1
60C1 hex 1 hex ✓ ✓ 1st set-point A601
60C2 hex Interpolation time period
60C2 hex 0 hex — — Highest subindex supported Constant value of 2
60C2 hex 1 hex — ✓ Interpolation time period
value
A602[0]
60C2 hex 2 hex — ✓ Interpolation time index A602[1]
60C4 hex Interpolation data
configuration
60C4 hex 0 hex — — Highest subindex supported Constant value of 5
 Loading...
Loading...





