Bei der Montage des Betriebsmittels ist darauf zu achten, dass keine starken
magnetischen und elektrischen Störfelder im Bereich des Sensors auftreten.
Unzulässige Störfelder können die Messgenauigkeit beeinflussen. Im Bereich des
Mess-Stabes darf die Feldstärke max. 3 mT betragen.
5.1 Mechanik Rohr-Gehäuseausführung
Der Messwert wird berührungslos über das Magnetfeld des Positionssensors auf den
Sensorstab eingekoppelt. Die Präzision der Messwerte ist u.a. abhängig von der
Symmetrie der Magnetfeldgeometrie. Das bedeutet für die Mechanik, dass der
Positionssensor zum Rohr zentrisch angebaut, und axial parallel präzise zu führen ist.
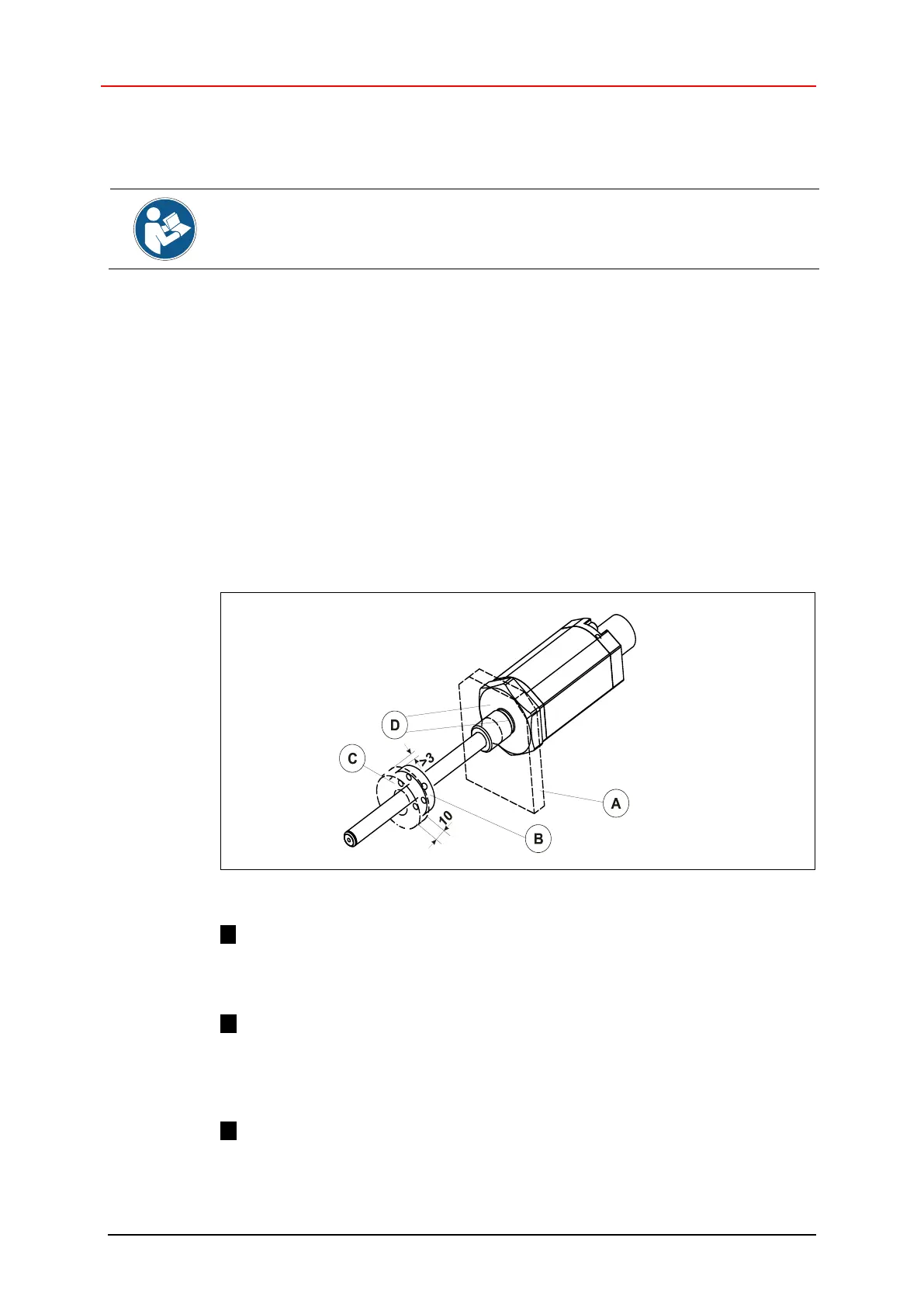
Abbildung 1: Montageschema
A: Der Wegsensor wird direkt mit dem Gewinde oder einer Mutter mit der Halterung
fixiert, mit einem Anzugsdrehmoment von < 50 Nm.
Das Befestigungsmaterial für den Wegsensor und Positionssensor B sollte unbedingt
aus nicht magnetisierbarem Material bestehen.
C: Wird magnetisierbares Befestigungsmaterial verwendet, muss ein Abstandshalter
aus nicht magnetisierbarem Material mit 10 mm Dicke und min. 3 mm größer im
Abstand zum Umfang des Positionssensors vorgesehen werden. Der Abstandshalter
ist zwischen dem Positionssensor und dessen Befestigung zu montieren. Die
Befestigungsschrauben müssen aus nicht magnetisierbarem Werkstoff sein.
D: Empfohlen wird die Hydraulikabdichtung an der Flanschanlagefläche mittels O-
Ring in einer Zylinderbodennut. Es kann die Abdichtung auch mit einem O-Ring in
der Gewindeauslaufnut erfolgen.
 Loading...
Loading...








