图仅用于说明部件摆放位置,实际物品请以收到内容为准。不同型号的配件会有所不同,具体请以
实际型号为准。
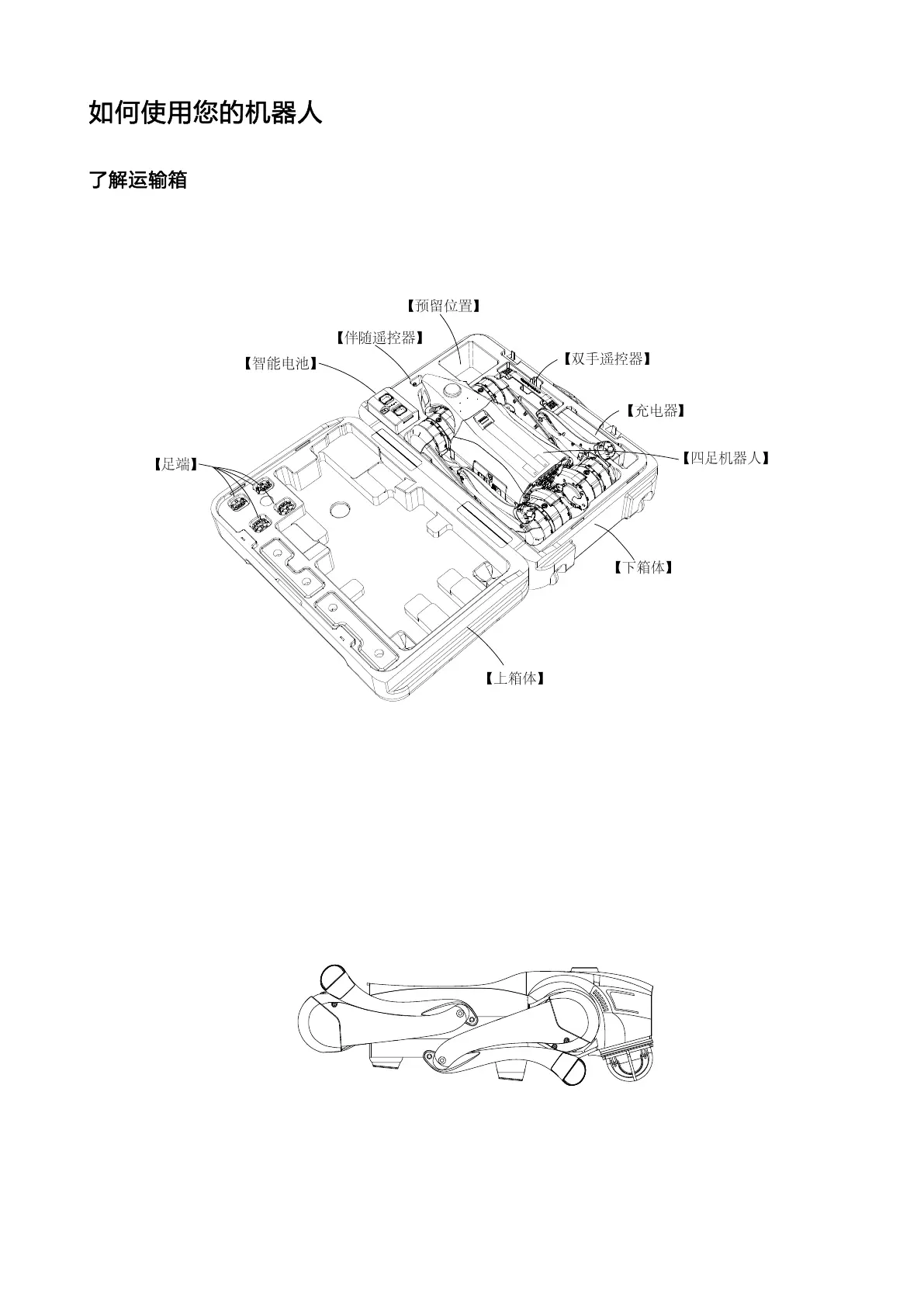
开箱
在平整的地面上正面朝上摆放箱体,然后打开上箱体。用提手带把机器人整体抬出,将配件依次从箱内取
出。学习如何正确使用机器人后,将四足机器人平放在平整的地面上,然后进行开机准备。
装箱
装箱前准备:将四足机器人的腿转动到如图示的位置(后腿收起步骤:旋转后腿髋关节电机使后大腿摆放
至上图示位置,同时收起后小腿摆放至图示位置。
完成装箱前的准备工作后,将四足机器人按图示方向装入下箱体内(装入过程中注意将四足机器人头部卡
入头部放置部中)。四足机器人装入下箱体后,将随货附带的电池、充电器等分别放入运输箱内的相应位置,
确保在上箱体合上时,以上部件都不会掉落。