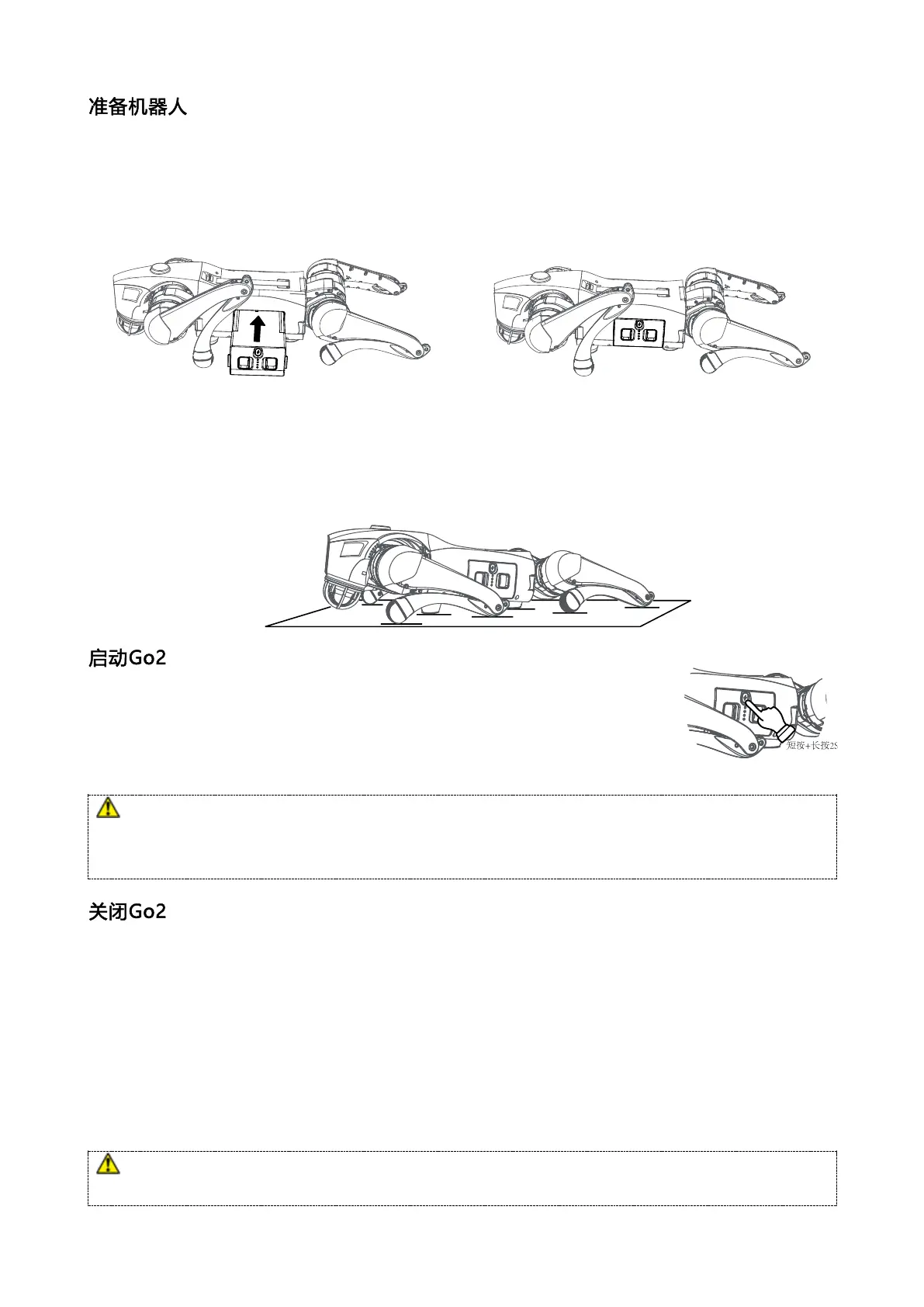
(1)安装电池包
将 Go2 放在平坦的地面上,将电池包从机器人侧面插入电池槽,注意安装方向,电源开关键朝上,不要强
行按压,以免损坏电池接口和卡扣,当听到“咔哒~”声,电池包安装完成。
(2)机身摆放(重要步骤!!!)
卧式开机:请确保开机运行前机器人放置在平整地面上,机器人腹部支撑垫需平贴地面,机身水平无倾斜
趴在地面,机器人小腿呈完全收起状态(如下图),四个膝关节以及足端平放在地面上,确保机器人大腿和小
腿都没被机身压住。
机器人完成机身摆放要求后,按照如下步骤开机:先短按 Go2 电源开关键 1 次,
再长按电源开关键 2 秒以上,可启动 Go2。Go2 启动过程时,头部指示灯绿色呼吸,
等待 2 分钟后,头部指示灯为绿色常亮,Go2 机身与地面平行即开机成功。
关机前,请务必确保机器人站立在平整地面上,确保机器人处于静态站立状态(机器人机身位置处于开机
起立后的初始状态,机身水平,静态站立时的状态。
⚫ 操纵机器人进入卧倒状态;
⚫ 机器人进入卧倒状态后,先短按电源键再长按电源键 2 秒关机。
关机后,请按照机身摆放要求,摆放好 Go2 大小腿和髋关节位置,为下次开机做准备。若长时间不使用
Go2,请取下电池包,按照装箱步骤,将 Go2 装入专用行李箱。