● 使用伴随遥控器控制 Go2
在通电之前,伴随遥控器应固定在如图位置,机器人开机成功后,可以使用伴随遥控器控制 Go2,具体操
作步骤如下:
Step 1:佩戴并启动伴随遥控器
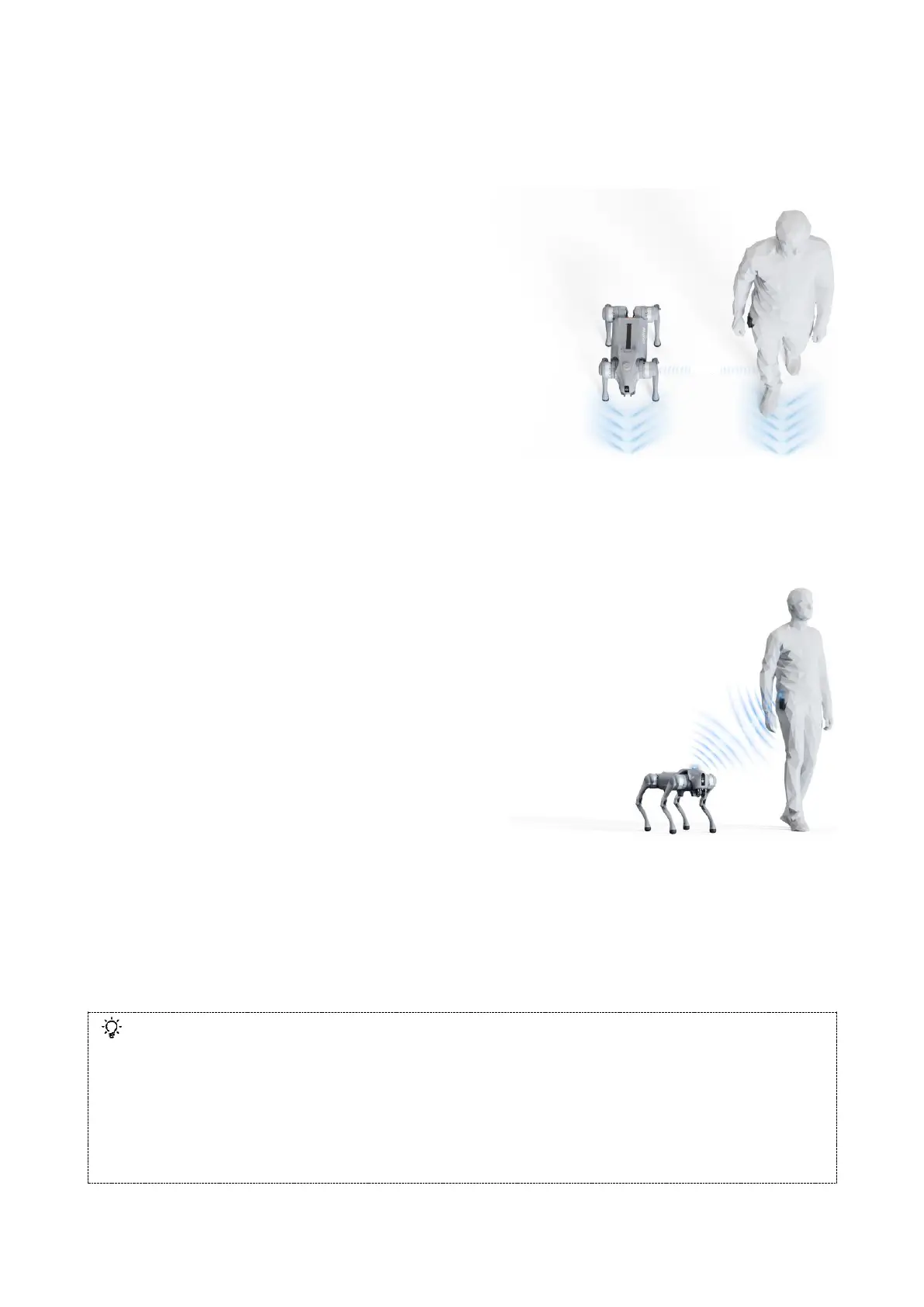
1. 将伴随遥控器外扣于人体右侧腰带上,人体站在
机器人正左侧,躯干朝向保持与机器人一致。
2. 短按伴随遥控器的电源键,当指示灯稳定亮起时打
开完毕,此时遥控器为摇杆模式。
Step 2:启动跟随模式(重要步骤)
1. 快速短按两次 M 键,开启慢速自动伴随模式,最
大速度 1.5m/s。
2. 在慢速自动伴随模式下,再次快速短按两次 M 键,进入快速自动伴随模式,最大速度 3.0m/s。
Step 3:开启/关闭避障功能
连续短按两次 L2 键开启避障;短按 1 次关闭避障。
Step 4:关闭自动跟随功能。
1. 短按一次 M 键:关闭伴随,进入摇杆控制模式。
2. 拨动摇杆:拨动摇杆,立刻停止伴随模式,并进入摇
杆模式。
3. 关机:长按 2 秒自动伴随遥控器的电源键,关闭自动
伴随遥控器。
4. 水平放置:伴随遥控器水平放置。
其他操作说明(用于调整机器)
1. 摇杆控制:伴随遥控器进入摇杆模式后,可通过摇杆控制机器人运动。使用摇杆控制模式,可以把遥控
器从腰带上拿下进行控制。如果遥控器拿下后需要继续使用自动跟随,则需要把遥控器佩戴后,再开启伴随。
2. 站起、趴下、阻尼模式:连续短按 P 键 2 次,机器人在趴下、阻尼和站起三种模式间循环切换。
3. 侧滚翻:机器人侧翻时,长按 P 键 1 秒,可恢复站立。
⚫ 在条件允许的情况下,选择更开阔的路线,尽可能减少机器人本身的自主规避功能的触发。
⚫ App 端无法与伴随遥控器同时控制机器人,如需使用伴随遥控器控制,请勿使用 App 控制机器人。
⚫ 使用时,请保持机器人在视线范围内控制,与使机器人保持至少 2 米以上的安全距离。