Removal, motor
The procedure below details how to remove motor, axis 3.
NoteAction
Decide which calibration routine to
use, and take actions accordingly
prior to beginning the repair proced-
ure.
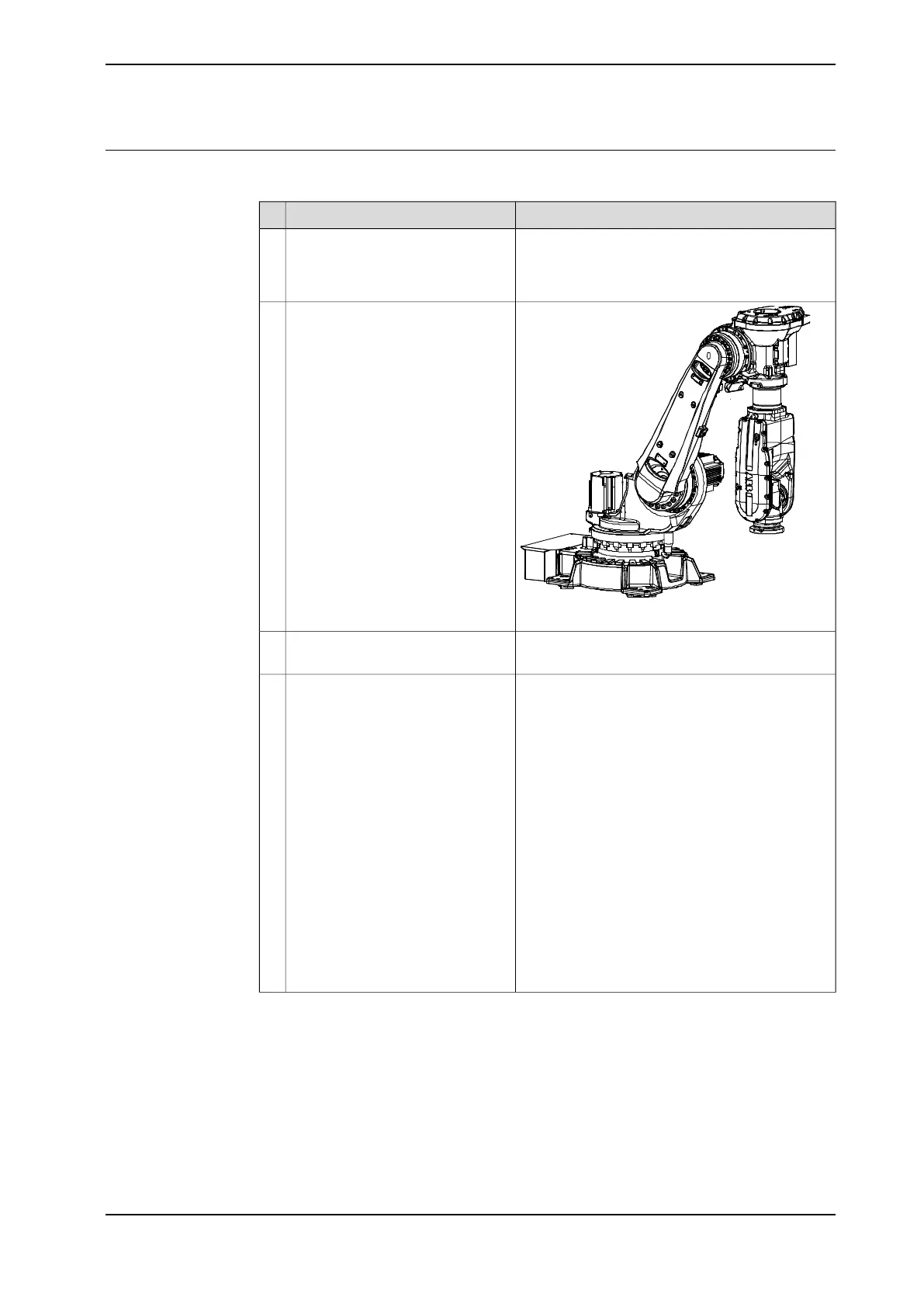
1
xx0600003041
Move the robot to the position
shown in the figure.
This is done in order to drain all oil
from the gearbox axis 3.
2
Detailed in the section Changing oil, axis-3 gear-
box on page 157.
Drain the oil from gearbox axis 3.3
Detailed in the section Manually releasing the
brakes on page 79.
Secure the robot from collapsing
once the motor axis 3 is removed,
by following the procedure detailed
below:
• Move the lower arm as far
back as possible.
• Release the brakes on motor
axis 2 and let the lower arm
rest on its mechanical stop.
• Also release the brakes on
motor axis 3 and let the up-
per arm rest on its mechanic-
al stop.
• The lower and upper arms
now rests on their respective
mechanical stops. The motor
axis 3 can now be replaced
without securing the armsys-
tem in an overhead crane.
4
Continues on next page
Product manual - IRB 6620 255
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.6.3 Replacement of motor, axis 3
Continued