Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 51
Configure Kinematics Coordinate Systems Chapter 3
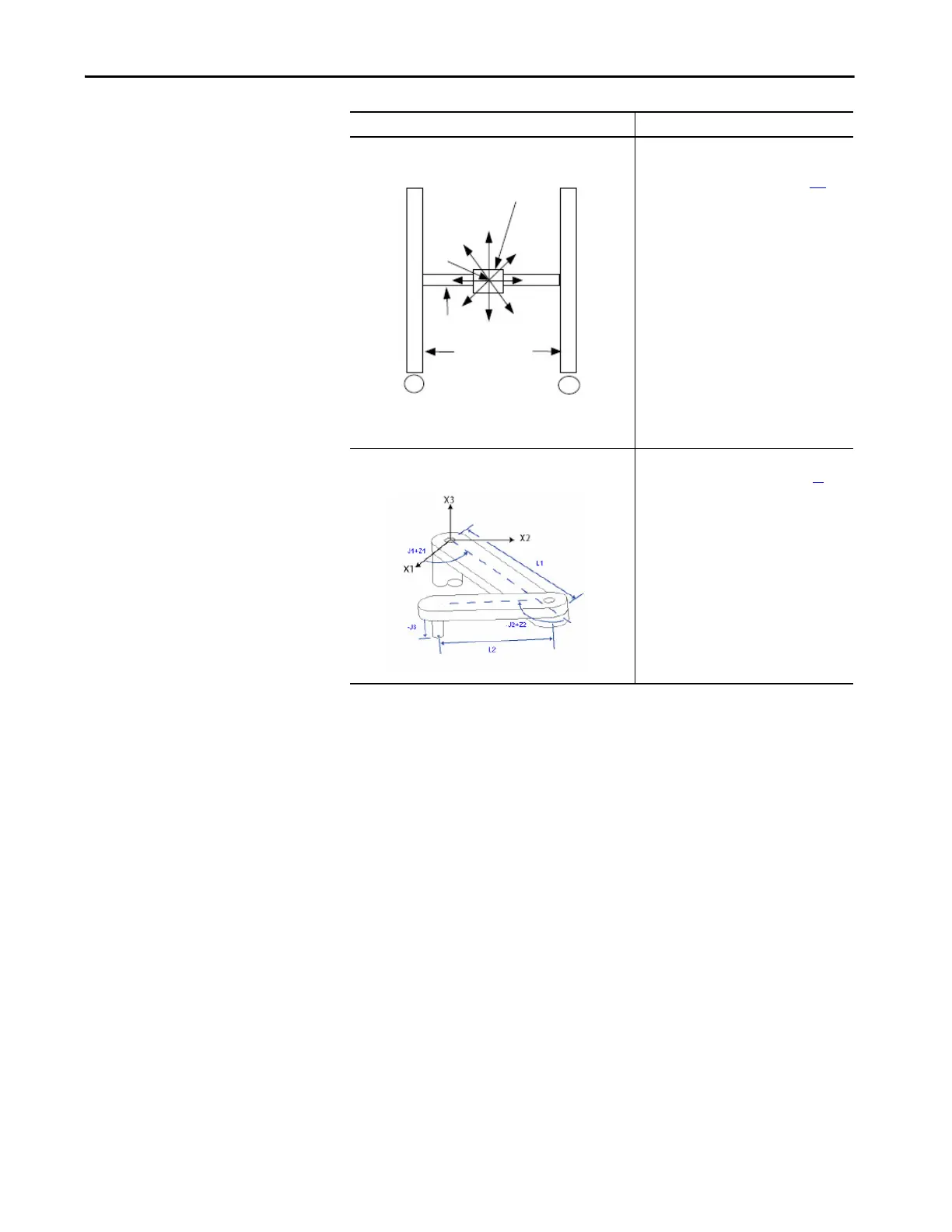
Cartesian
This illustration shows a typical H-bot.
For configuration information see page 103
.
SCARA Independent
For configuration information, see page 84
.
If your robot looks similar to Your Coordinate System type is
X
2
Axis
Sliding Member
TCP
Sliding rail
Stationary Rails
Stationary Motors B
X
1
Axis
Stationary Motors A

 Loading...
Loading...





