Process Control Instructions
Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 131
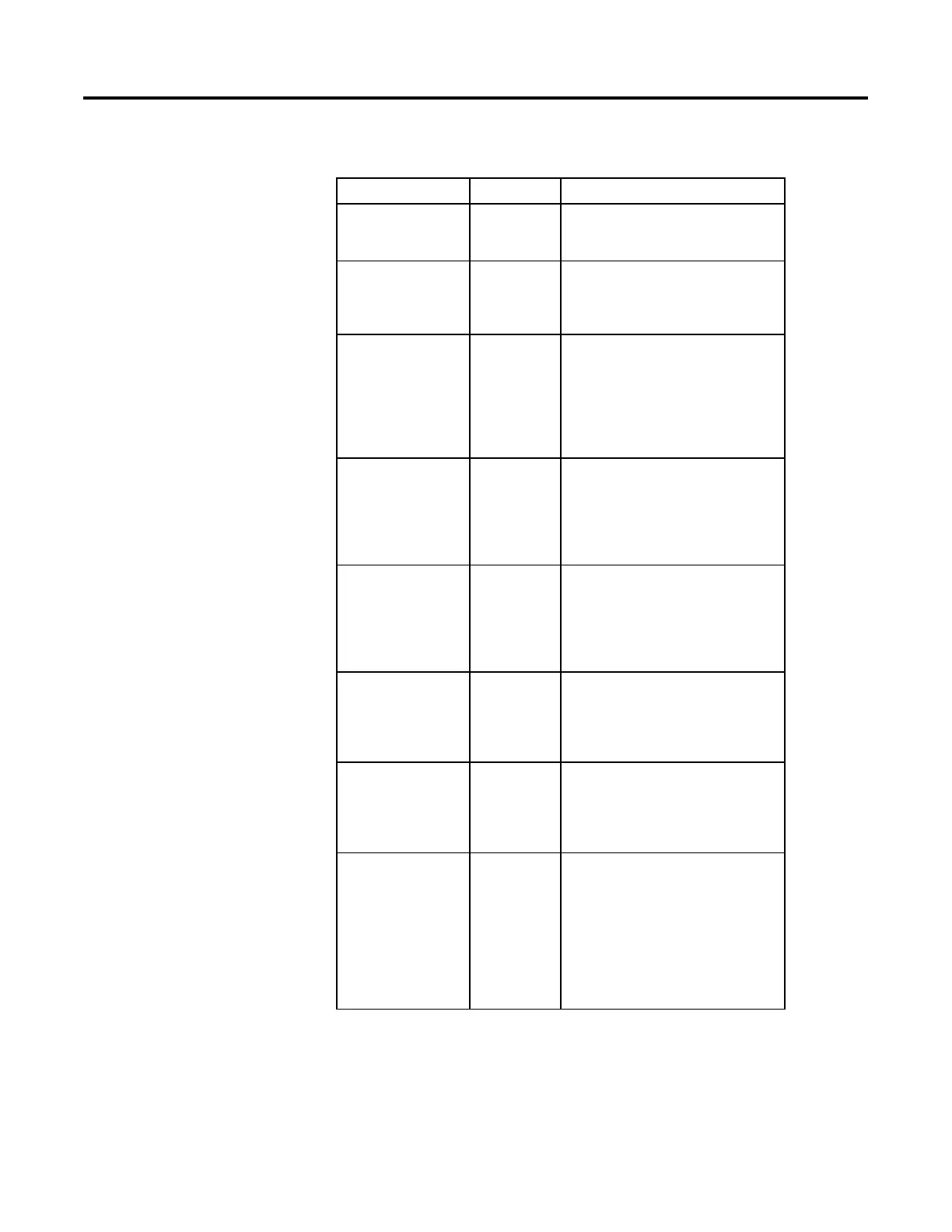
SPLIT_RANGE Structure
Input Parameter Data Type Description
EnableIn BOOL Enable input. If false, the instruction does not
execute and outputs are not updated.
Default is true.
In REAL The analog signal input asking for heating or
cooling. This input typically comes from the CVEU
of a PID loop.
Valid = any float
CycleTime REAL The period of the output pulses in seconds. A
value of zero turns off both heat and cool outputs.
If this value is invalid, the instruction assumes a
value of zero and sets the appropriate bit in
Status.
Valid = any positive float
Default = 0.0
MaxHeatIn REAL Maximum heat input. This value specifies the
percentage of the In which will cause maximum
heating. This is typically 100% for a heat/cool
loop.
Valid = any float
Default = 100.0
MinHeatIn REAL Minimum heat input. Specify the percent of In
that represents the start of the heating range and
causes minimum heating. This is typically 50% for
a heat/cool loop.
Valid = any float
Default = 50.0
MaxCoolIn REAL Maximum cool input. Specify the percent of In
that causes maximum cooling. This is typically 0%
for a heat/cool loop.
Valid = any float
Default = 0.0
MinCoolIn REAL Minimum cool input. Specify the percent of In
that causes minimum cooling. This is typically
50% for a heat/cool loop.
Valid = any float
Default = 50.0
MaxHeatTime REAL Maximum heat time in seconds. Specify the
maximum time in seconds that a heating pulse
can be on. If the instruction calculates HeatTime
to be greater than this value, HeatTime is limited
to MaxHeatTime. If MaxHeatTime is invalid, the
instruction assumes a value of CycleTime and sets
the appropriate bit in Status.
Valid = 0.0 to CycleTime
Default = CycleTime
 Loading...
Loading...

