Process Control Instructions
Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 257
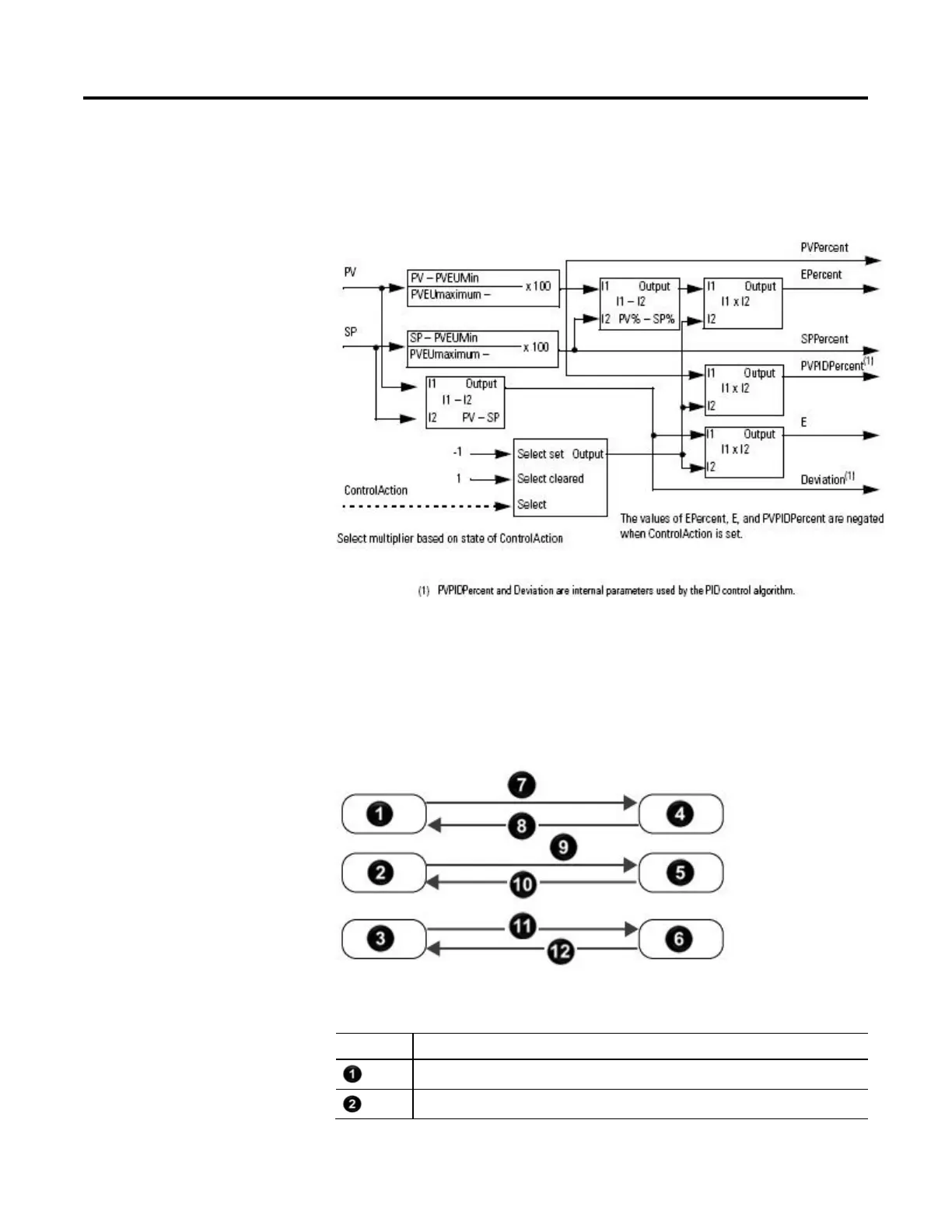
The instruction converts PV and SP to a percent and calculates the error before
performing the PID control algorithm. The error is the difference between the PV
and SP values. When ControlAction is set, the values of EPercent, E, and
PVPIDPercent are negated before being used by the PID algorithm.
Primary loop control is typically used by a primary PID loop to obtain bumpless
switching and anti-reset windup when using Cascade/Ratio mode. The primary
loop control includes the initialize primary loop output and the anti-reset windup
outputs. The InitPrimary output is typically used by the CVInitReq input of a
primary PID loop. The windup outputs are typically used by the windup inputs of
a primary loop to limit the windup of its CV output.
Item Description
InitPrimary is cleared
WindupHOut is cleared
(4)
Convert the PV and SP Values to
Percent
 Loading...
Loading...

