280 Rockwell Automation Publication 1756-RM006K-EN-P - November 2018
PI Instruction: Linear Mode
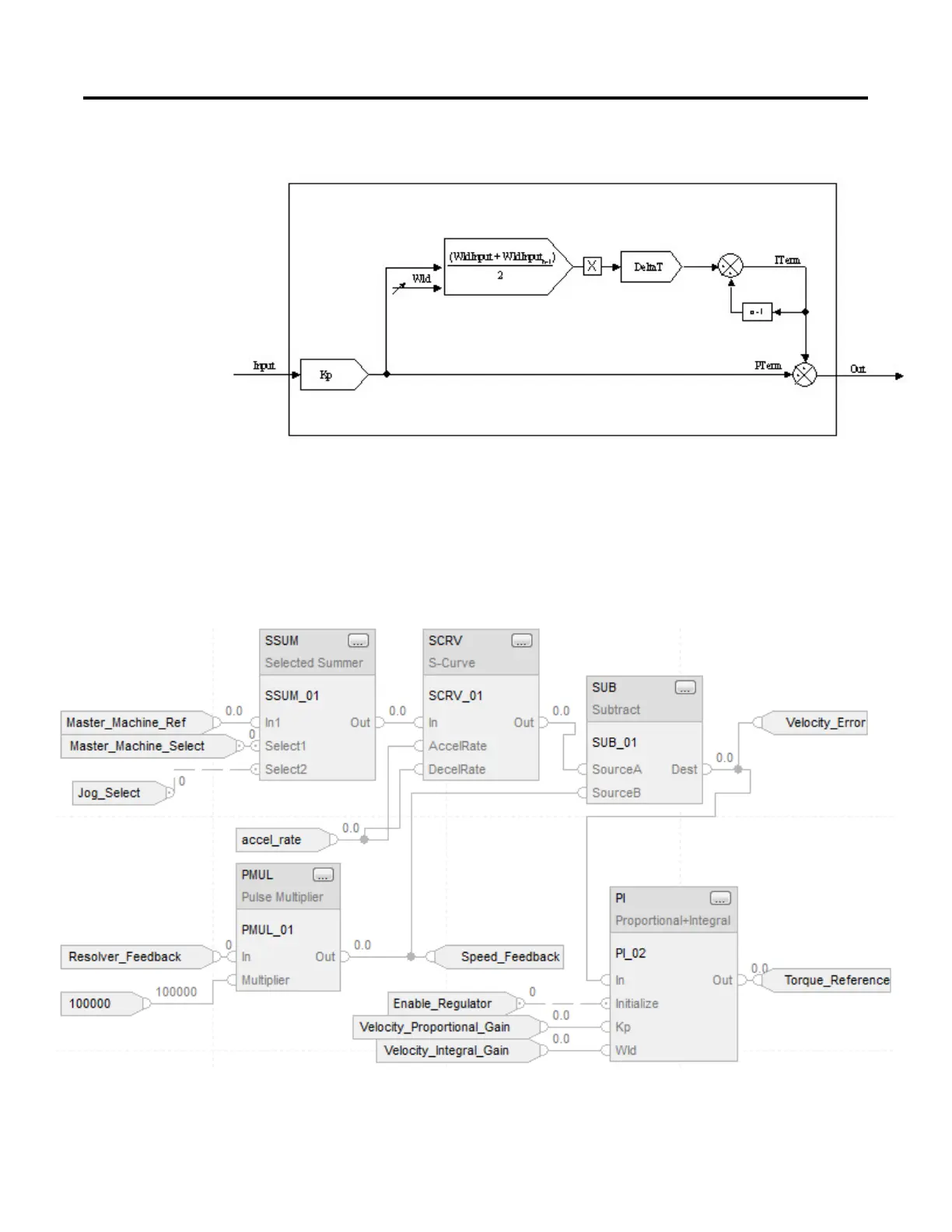
The following example shows the PI instruction used as a velocity regulator. In
this example, velocity error is created by subtracting the velocity feedback signal
(see the PMUL instruction example) from the system’s velocity reference (through
the SCRV instruction). Velocity error is driven directly into the PI instruction,
which acts on this signal according to the function shown in the diagram above.
Function Block
 Loading...
Loading...



