Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 287
value so that all counts or "pulses" are ultimately accounted for and no data is lost
in the system. The output of the block, Out always yields a whole number in a
floating point data type.
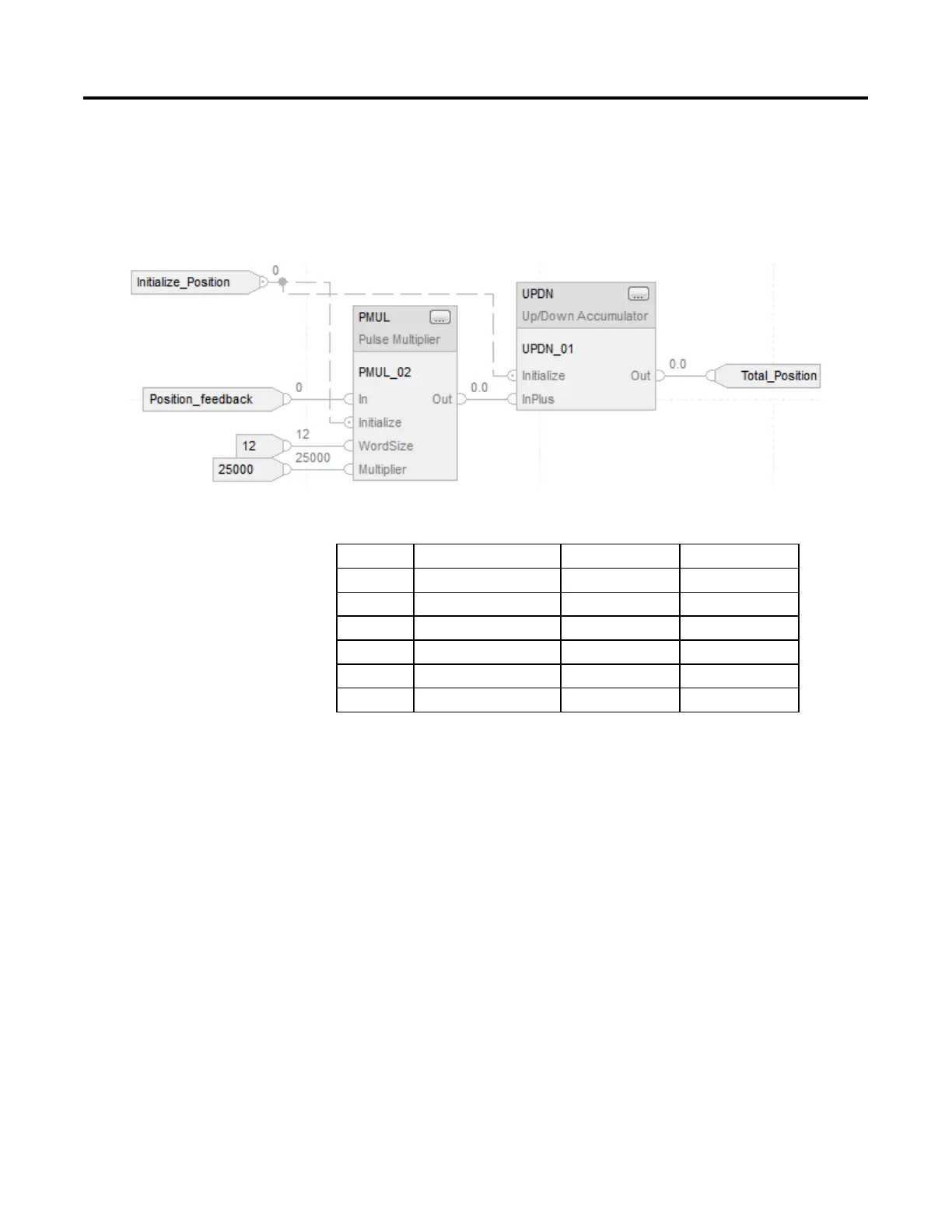
Function Block
Assuming Initial_Position = 0 and Multiplier = 2500 => (25,000/100,000)
Scan Position_Feedback PMUL_02.Out Total_Position
n 0 0 0
n + 1 1 0 0
n + 2 2 0 0
n + 3 3 0 0
n + 4 4 1 1
n + 5 5 0 1
Structured Text
MUL_02.In := Position_feedback;
PMUL_02.Initalize := Initialize_Position;
PMUL_02.WordSize := 12;
PMUL_02.Multiplier := 25000;
PMUL(PMUL_02);
UPDN_02.Initialize := Initialize_Position;
UPDN_02.InPlus := PMUL_02.Out;
UPDN(UPDN_02);
Total_Position := UPDN_02.Out;
Example 2
In this electronic line shaft application, motor A’s feedback acts as a master
reference which motor B needs to follow. Motor A’s feedback is aliased to
"Position_feedback." Motor B’s feedback is aliased to "Follower_Position." Due to
 Loading...
Loading...

