Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 299
SEC_ORDER_CONTROLLER Structure
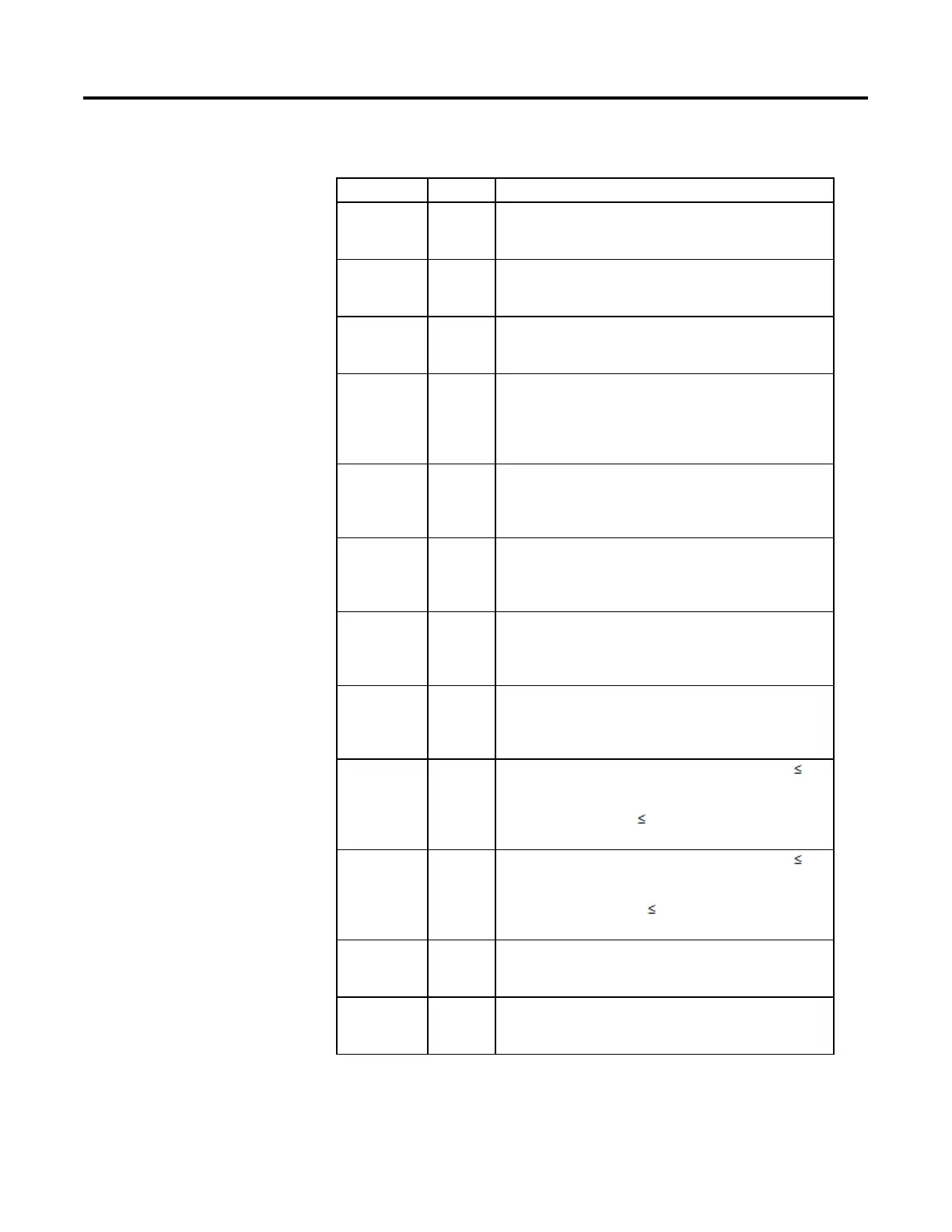
Input Parameter Data Type Description
EnableIn BOOL Enable input. If cleared, the instruction does not execute and outputs are not
updated.
Default is set.
In REAL The analog signal input to the instruction.
Valid = any float
Default = 0.0
Initialize BOOL The instruction initialization command. When set, Out and internal
integrator are set equal to the value of InitialValue.
Default is cleared.
InitialValue REAL The initial value input. When Initialize is set, Out and integrator are set to
the value of InitialValue. The value of InitialValue is limited using HighLimit
and LowLimit.
Valid = any float
Default = 0.0
Gain REAL The proportional gain for the instruction. If the value is out of range, the
instruction limits the value and sets the appropriate bit in Status.
Valid = any float > 0.0
Default = minimum positive float
WLag REAL First order lag corner frequency in radians/second. If the value is out of
range, the instruction limits the value and sets the appropriate bit in Status.
Valid = see the Description section below for valid ranges
Default = 0.0
WLead REAL Second order lead corner frequency in radians/second. If the value is out of
range, the instruction limits the value and sets the appropriate bit in Status.
Valid = see the Description section below for valid ranges
Default = 0.0
ZetaLead REAL Second order lead damping factor. If the value is out of range, the
instruction limits the value and sets the appropriate bit in Status.
Valid = 0.0 to 10.0
Default = 0.0
HighLimit REAL The high limit value. This is the maximum value for Out. If HighLimit
LowLimit, the instruction sets HighAlarm and LowAlarm, sets the
appropriate bit in Status, and sets Out = LowLimit.
Valid = LowLimit < HighLimit maximum positive float
Default = maximum positive float
LowLimit REAL The low limit value. This is the minimum value for Out. If HighLimit
LowLimit, the instruction sets HighAlarm and LowAlarm, sets the
appropriate bit in Status, and sets Out = LowLimit.
Valid = maximum negative float LowLimit < HighLimit
Default = maximum negative float
HoldHigh BOOL The hold high command. When set, the value of the internal integrator is
not allowed to increase in value.
Default is cleared.
HoldLow BOOL The hold low command. When set, the value of the internal integrator is not
allowed to decrease in value.
Default is cleared.
 Loading...
Loading...

