Process Control Instructions
Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 53
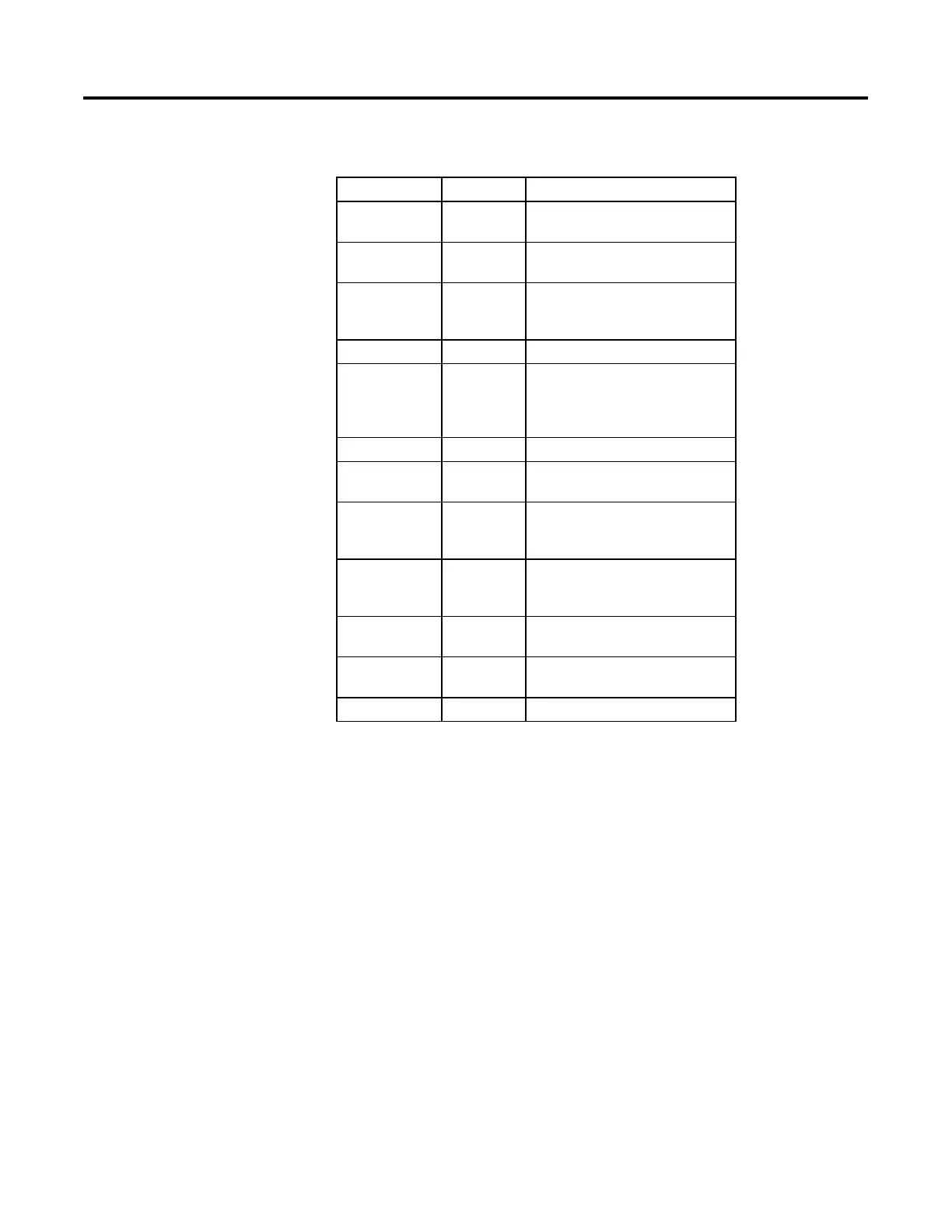
Output Parameter Data Type Description
EnableOut BOOL Indicates if instruction is enabled. Cleared to
false if Out overflows.
Out REAL The calculated output of the deadtime
algorithm.
DeltaT REAL Elapsed time between updates. This is the
elapsed time in seconds used by the control
algorithm to calculate the process output.
Status DINT Status of the function block.
InstructFault
(Status.0)
BOOL The instruction detected one of the following
execution errors. This is not a minor or major
controller error. Check the remaining status
bits to determine what occurred.
InFaulted (Status.1) BOOL In health is bad.
DeadtimeInv
(Status.2)
BOOL Invalid Deadtime value.
TimingMode
(Status.27)
BOOL Invalid TimingMode value.
For more information about timing modes, see
Function Block Attributes.
RTSMissed (Status.28) BOOL Only used in real time sampling mode. Set
when
ABS(DeltaT - RTSTime) > 1 millisecond.
RTSTimeInv
(Status.29)
BOOL Invalid RTSTime value.
RTSTimeStampInv
(Status.30)
BOOL Invalid RTSTimeStamp value.
DeltaTInv (Status.31) BOOL Invalid DeltaT value.
Description
The DEDT instruction uses a data buffer to store delayed data, thereby allowing
any length deadtime desired. The DEDT instruction is designed to execute in a
task where the scan rate remains constant.
To use the DEDT instruction, create a storage array to store the deadtime buffer
to hold the samples of (In x Gain) + Bias. The storage array should be large enough
to hold the largest desired deadtime, using this formula:
StorageArray Size Needed = Maximum Deadtime (secs) / DeltaT (secs)
Servicing the Deadtime Buffer
During runtime, the instruction checks for a valid Deadtime. Deadtime must be
between 0.0 and (StorageArray Size x DeltaT).
If the Deadtime is invalid, the instruction sets an appropriate Status bit and sets
Out = (In x Gain) + Bias.
 Loading...
Loading...

