38 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 3 Configure Integrated Motion Control Using Kinetix Drives
3. Click OK.
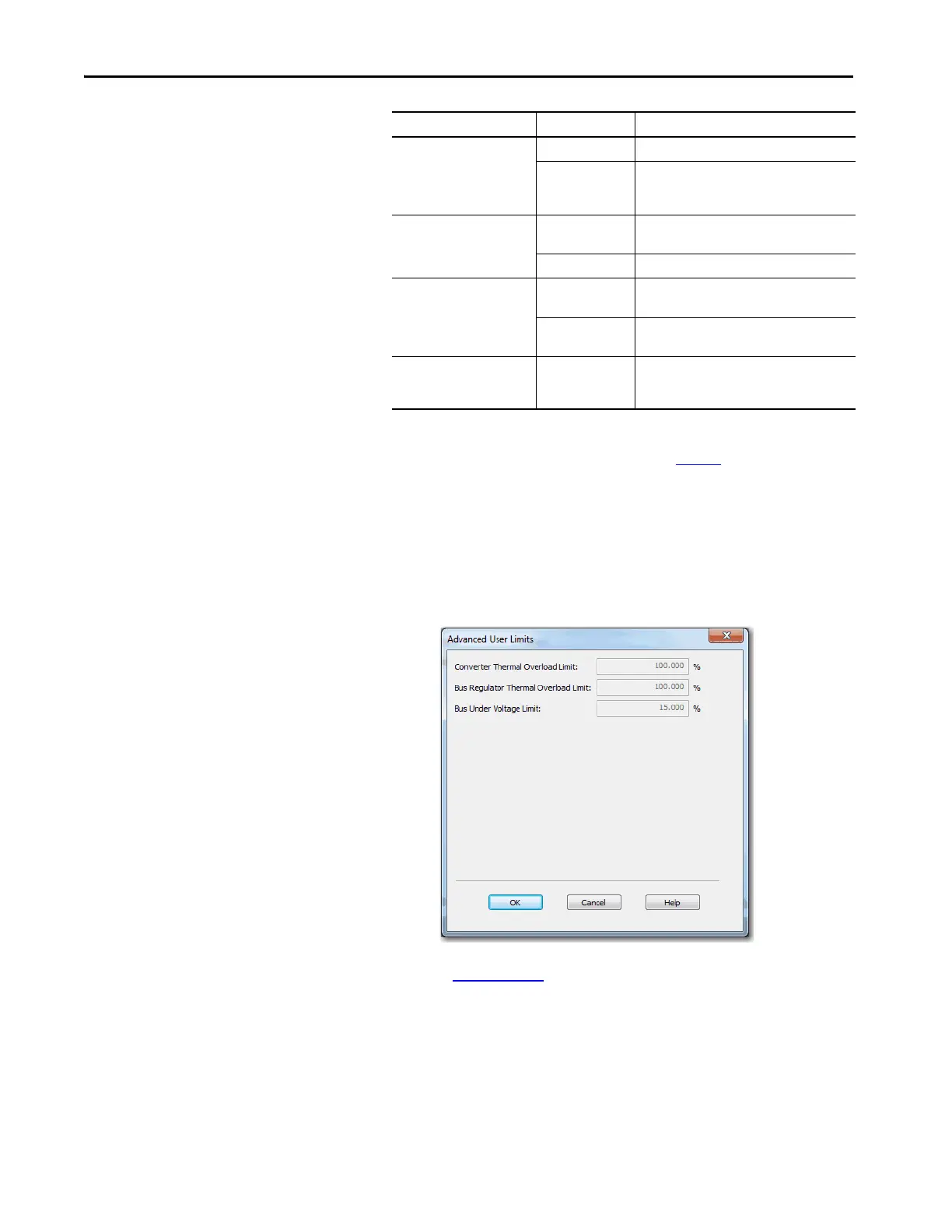
You can change the overload and voltage limits when you are offline. You
cannot change settings while online but the values are displayed.
(1)
Figure 2 - Kinetix 5500 Offline Display of the Advanced Limits Dialog Box
See publication 2198-UM001, Kinetix 5500 Servo Drives, for more
information.
Bus-sharing Group
Standalone Applies to standalone bus configurations.
•Group1
•Group2
•Group3…
Applies to any bus-sharing configuration.
(2)
Shunt Regulator Action
Disabled
Disables the internal shunt resistor and external
shunt option.
Shunt Regulator Enables the internal and external shunt options.
Shunt Regulator Resistor Type
Internal
Enables the internal shunt (external shunt option
is disabled).
External
Enables the external shunt (internal shunt
option is disabled).
External Shunt
(3)
•None
• 2097-R6
• 2097-R7
Selects external shunt option. Only the shunt
model that is intended for the drive model is
shown.
(1) Bus Configuration selection is not applicable to all EtherNet/IP drives.
(2) All drives physically connected to the same shared-bus connection system must be part of the same bus-sharing
group in the Logix Designer application.
(3) See the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003
, for more information on the
Bulletin 2097 external shunt resistors.
(1) Not applicable to the Kinetix 350 drive.
Attribute Menu Description

 Loading...
Loading...












