96 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 4 Configure Integrated Motion Control Using Kinetix 5700 Drives
If a permanent magnet motor is selected from the Motion Database, the
Commutation Alignment is set to Controller Offset. However, if a permanent
magnet motor is specified from Nameplate data sheet, you must specify the
Commutation Alignment method. The default is set to Not Aligned.
In most cases, the Commutation Alignment is set to Controller Offset and the
Commutation test is run during commissioning to determine the
Commutation Offset and Polarity.
See the Integrated Motion Reference Manual, publication MOTION-RM003
,
for more information on axis attributes.
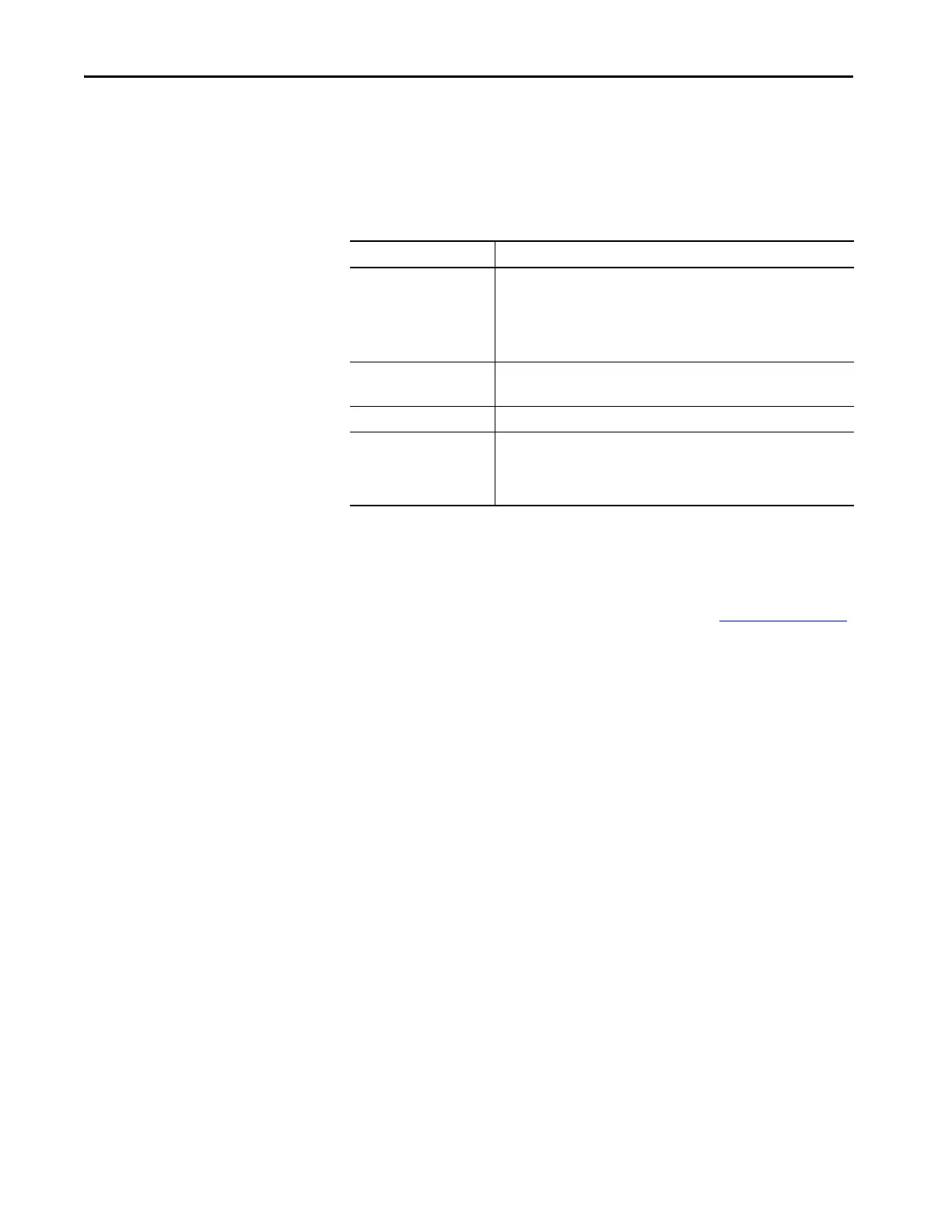
Table 28 - Commutation Alignment Settings
Type Description
Not Aligned Not Aligned indicates that the motor is not aligned, and that the
Commutation Offset value is not valid. If the Commutation Offset is not
valid, the drive cannot use it to determine the commutation angle. Any
attempt to enable the drive with an invalid commutation angle results in
a Start Inhibit condition.
Controller Offset Controller Offset applies the Commutation Offset value from the
controller to determine the electrical angle of the motor.
Motor Offset The drive derives the commutation that is offset directly from the motor.
Self-Sense The drive automatically measures the commutation that is offset when it
transitions to the Starting state for the first time after a power cycle. This
setting generally applies to a PM motor equipped with a simple
incremental-feedback device.

 Loading...
Loading...












