8.3.3 Acceleration and deceleration time and curve setting
Acceleration time refers to the time required for the inverter to accelerate from zero frequency to the
maximum output frequency of F0.07; deceleration time refers to the time required for the inverter to decelerate
from the maximum output frequency of F0.07 to zero frequency.
● Linear acceleration and deceleration
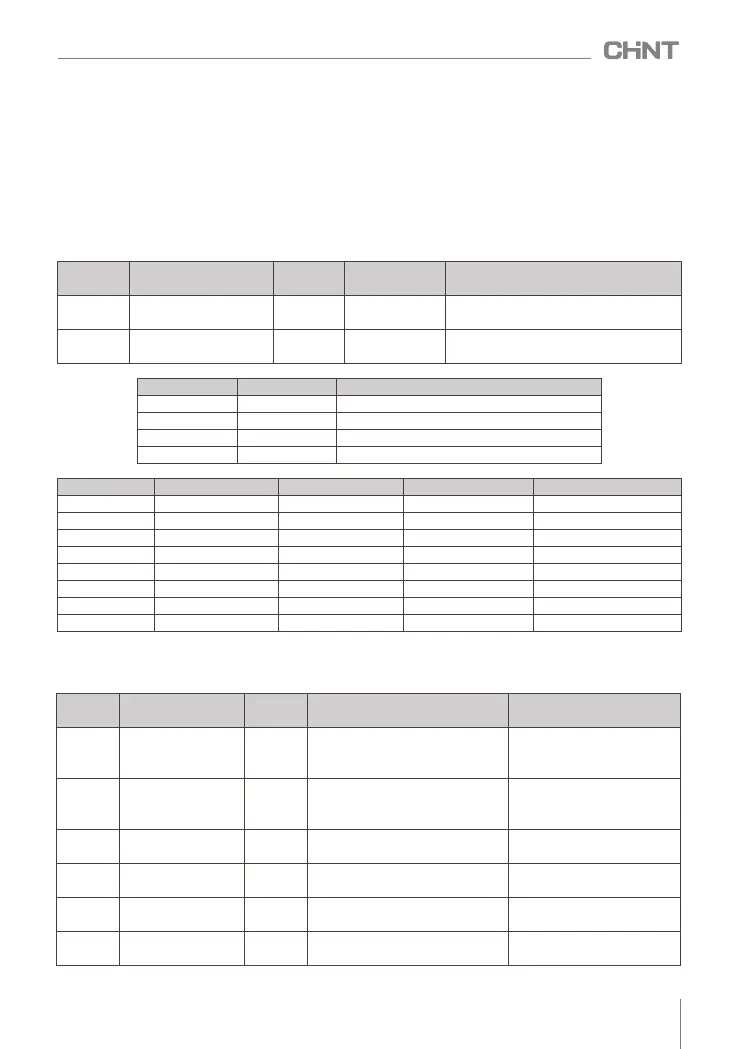
NVF2G-S provides 4 groups of acceleration and deceleration time, which can be switched and selected by
digital input terminal X. For example: select X1 and X2 as the input switching terminals, and form 2-digit binary
numbers in turn (where 1 means that the setting function of the X terminal is valid, and 0 means that the
setting function of the X terminal is invalid).
function
code
name
set value
Predetermined
area
Parameter Description
F5.01
X1 terminal function
selection
28
0~63
28 : Acceleration and deceleration time
selection terminals
F5.02
X2 terminal function
selection
29 0~63
29 : Acceleration and deceleration time
selection terminal
X2 terminal X1 terminal Acceleration and deceleration time curve
0 0
The first group: F 0.14 , F0.15
0
1
The second group: F 8.04 , F 8.05
1
0
The third group: F 8.06 , F 8.07
1 1
The fourth group: F 8.08 , F 8.09
function code
name
default value
Predetermined area
Parameter Description
F0.14
Acceleration time 1
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F0.15
Deceleration time 1
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.04
Acceleration time 2
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.05
Deceleration time 2
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.06
Acceleration time 3
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.07
Deceleration time 3
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.08
Acceleration time 4
Model confirmed
( 0.0 ~ 6500.0 ) s
--
F8.09
Deceleration time 4
Model confirmed
( 0.0 ~ 6500.0 ) s
--
8.4 Motor parameter self-learning
Motor parameter self-learning is the process for the inverter to obtain the parameters of the controlled
motor. The self-learning methods include: static self-learning and dynamic self-learning.
function
code
name
default
value
Predetermined area
Parameter Description
F2.22
Motor parameter self-
learning
0 0~ 2
0: no operation
1: Motor static self-learning
2: Motor dynamic self-learning
F2.00
Motor Type Selection
0 0~ 2
0: Ordinary asynchronous motor
1: reserved
2: reserved
F2.01
Motor rated power
Model
confirmed
(0. 1 ~ 1000.0 ) kW
F2.02
Motor rated voltage
Model
confirmed
1V ~ inverter rated voltage
F2.03
Motor rated current
Model
confirmed
(0.01~600.00)A (inverter power<=55kW)
(0.1~6000.0)A (inverter power>55kW)
F2.04
Motor rated frequency
Model
confirmed
0.01 ~F0.07
049
NVF2G-S Series Inverter User's Guide
 Loading...
Loading...