Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
Menu 3
Digitax ST Advanced User Guide 59
Issue Number: 1 www.controltechniques.com
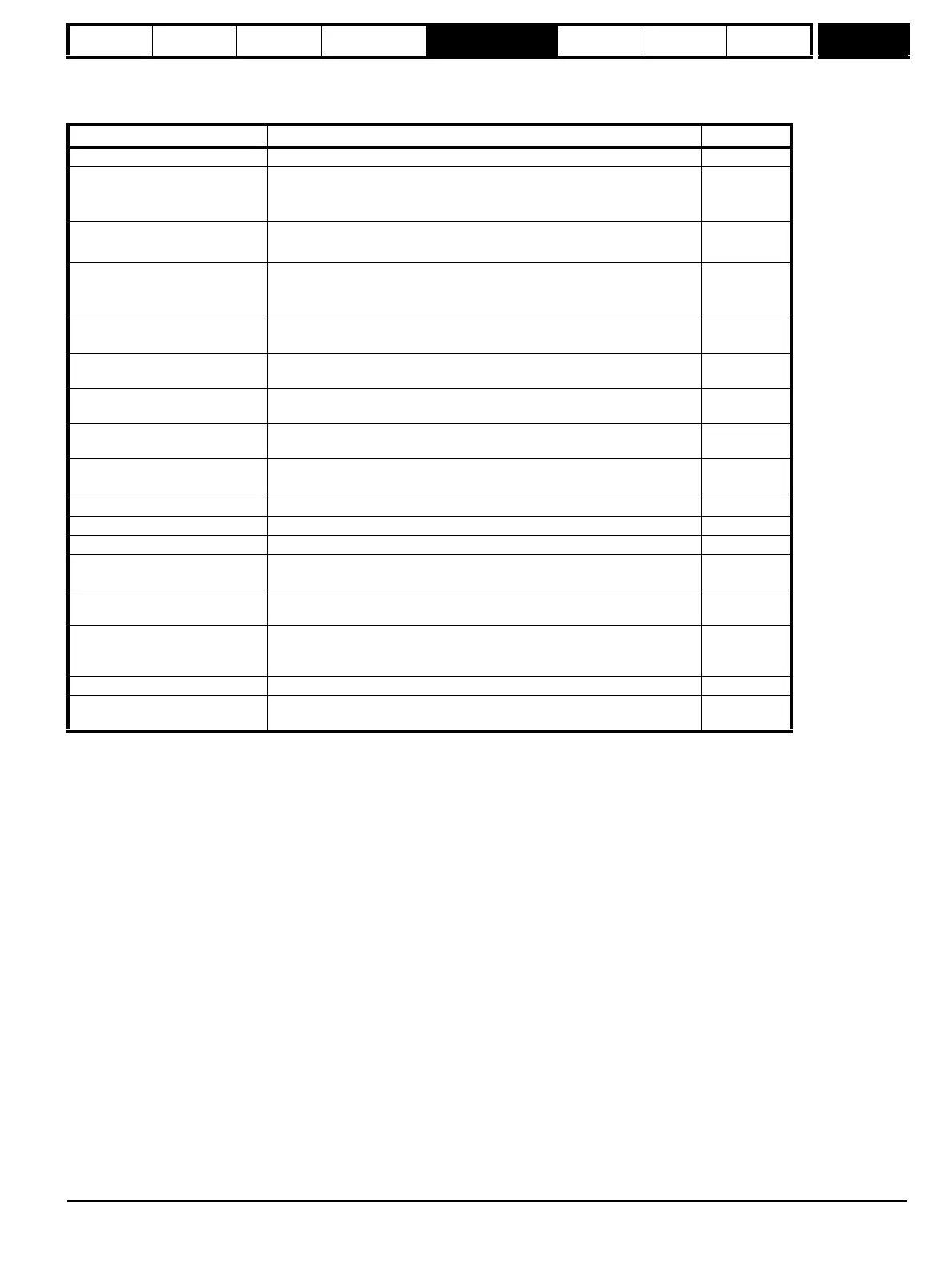
Encoder trips
The following table shows trips that can be initiated that are related to the drive encoder feedback and whether they can be enabled and disabled by
Pr 3.40.
+These trips can be enabled/disabled by Pr 3.40
1. If the terminations are not enabled on the A, B or Z inputs the wire break system will not operate. (Note that as default the Z input terminations
are disabled to disable wire break detection on this input). No wire break detection is provided on the U, V or W commutation signals.
2. Phase error for a servo type encoder is to detect that the incremental pulses have been counted incorrectly. The error is detected if the
incremental position moves by 10° with respect to the position defined by the UVW commutation signals. The trip is initiated if the error is
detected for 10 consecutive samples.
3. Phase error for SinCos encoders with comms is detected by interrogating the encoder every second via comms to compare the incremental
position determined from the sine waves with the incremental position via comms. If the error is greater than 10° for 10 consecutive samples the
trip is initiated. It should be noted that this system should not be used where 180 x Pr 5.11 (or Pr 21.11 for motor map 2) / Pr 3.34 is greater than
10° or else incorrect EnC3 trips will occur.
4. Incorrect encoder phasing is detected if the motor reaches half of the speed defined by SPEED_FREQ_MAX and the phasing error is larger
enough for the motor to accelerate uncontrollably. It can be disabled by setting Pr 3.08 to any value greater than zero.
5. This trip can also be caused when data is transferred between the encoder and a Solutions Module, such as an SM-Applications module, and an
error other than those covered by EnC5 or EnC6 occurs.
Encoders Reason for error Drive trip
All Power supply short circuit EnC1
Ab, Fd, Fr, Ab.Servo, Fd.Servo,
Fr.Servo,
SC, SC.Hiper, SC.EnDat, SC.SSI
+Hardware wire-break detect on A, B and Z inputs
(1)
Software wire break detection on sine wave signals
There is no wire break detection on the U, V and W commutation inputs
EnC2
Ab.Servo, Fd.Servo, Fr.Servo
SC.Hiper, SC.EnDat, SC.SSI
+Phase error
(2)
+Sine/cosine phase error
(3)
EnC3
SC.Hiper, SC.EnDat, SC.SSI
EnDat
SSI
Comms failure (timeout)
(5)
Comms failure (timeout) or transfer time too long
Comms transfer time is too long
EnC4
SC.Hiper, SC.EnDat, EnDat
Checksum/CRC error or SSI not ready at start of position transfer (i.e. data
input not one)
EnC5
SC.Hiper, SC.EnDat, EnDat
SSI, SC.SSI
The encoder has indicated an error
+Power supply failure
EnC6
SC, SC.Hiper, SC.EnDat,
SC.SSI, EnDat, SSI
Initialisation has failed due to a comms error. EnC7
SC.Hiper, SC.EnDat, EnDat
Auto-configuration has been requested by changing Pr 3.41, but an
initialisation has not occurred to perform auto-configuration.
EnC8
All
Speed feedback selected from an option slot that does not have a position
feedback category Solutions Module installed
EnC9
All
Incorrect encoder phasing
(4)
EnC10
SC, SC.Hiper, SC.EnDat, SC.SSI Failure of analog position alignment during encoder initialisation Enc11
SC.Hiper The encoder type could not be identified during auto-configuration Enc12
SC.EnDat, EnDat
The number of encoder turns read from the encoder during auto-
configuration is not a power of 2
Enc13
SC.EnDat, EnDat
The number of bits defining the encoder position within a turn read from the
encoder during auto-configuration is too large.
Enc14
SC.Hiper, SC.EnDat, EnDat
The number of periods per revolution is either less than 1 or greater than
50000 when read or calculated from the encoder data during auto-
configuration.
Enc15
SC.EnDat, EnDat The number of comms bits per period are larger than 255. Enc 16
SC.Hiper, SC.EnDat, EnDat
This is a rotary encoder (Pr 3.39=1 or 2) and the lines per revolution read
from this encoder are not a power of two.
Enc 17