Menu 4
Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
70 Digitax ST Advanced User Guide
www.controltechniques.com Issue Number: 1
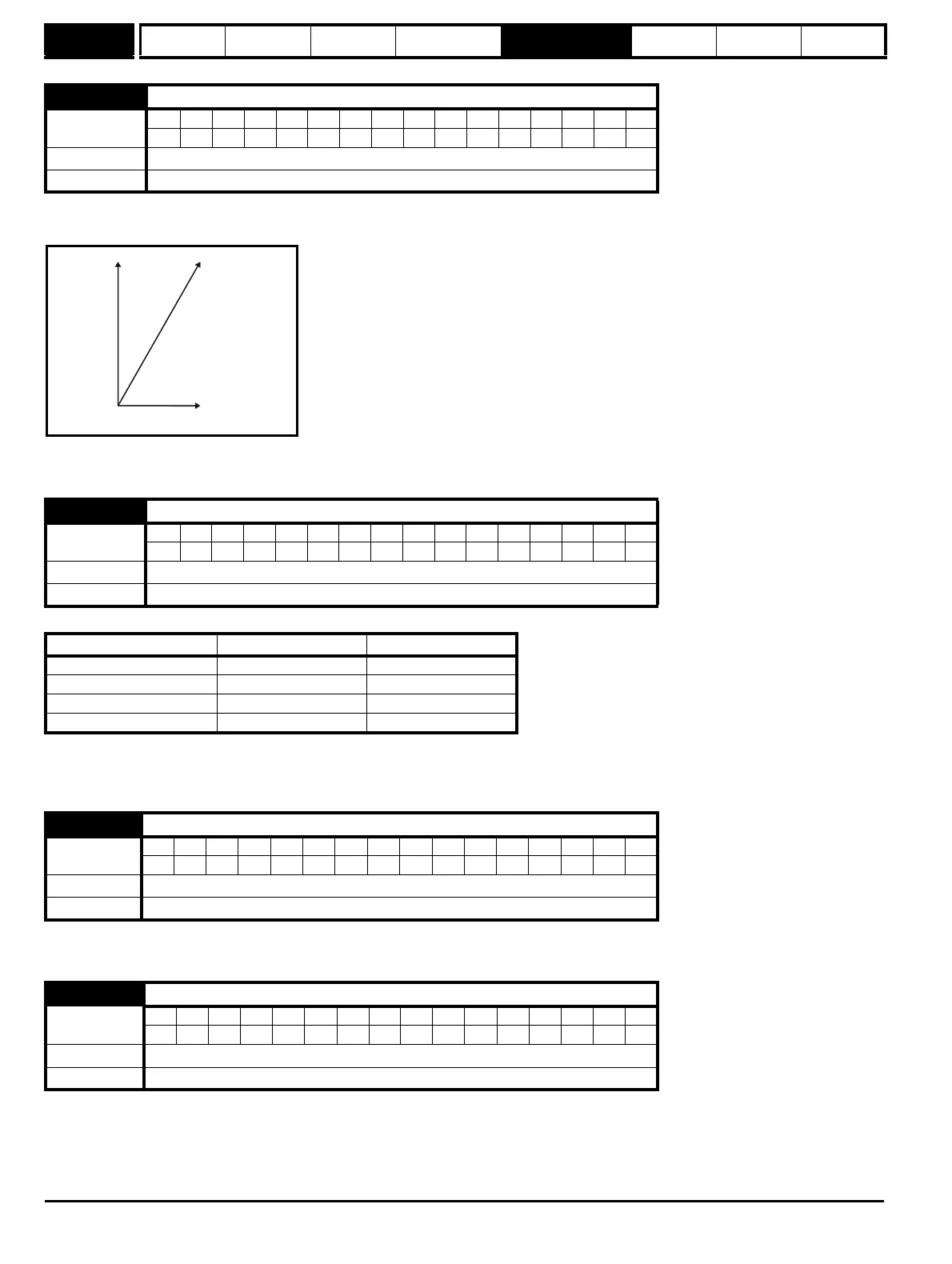
This parameter is the r.m.s. current from each output phase of the drive. In normal operation with a permanent magnet servo motor, this parameter
shows the magnitude of the active current in Pr 4.02. When in the field weakening range, the phase currents consist of an active component and a
reactive component. The three phase currents can be combined to form a resultant current vector as shown below:
The resultant current magnitude is displayed by this parameter. The active current is the torque producing current for a motor drive. The reactive
current is the magnetizing or flux producing current.
The active current is the torque producing current.
The active current is aligned with the y axis of the reference frame. The x axis of the reference frame is aligned with the rotor flux vector. The motor
torque is proportional to the torque producing current when field weakening is not active. Once field weakening is active the torque producing current
is boosted to compensate for the reduction in motor flux.
The torque demand can be derived from the speed controller and/or the torque reference and offset. The units of the torque demand are % of rated
torque. 100% rated torque is defined as the torque produced by 100% rated active current.
The current demand is derived from the torque demand. Provided the motor is not field weakened the torque and current demands are the same. In
the field weakening range the current demand is increased with reduced flux. The level of flux is derived from the motor model within the drive
controllers.
Pr 4.04 = Pr 4.03 x flux / rated flux
4.01 Current magnitude
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1121111
Range 0 to DRIVE_CURRENT_MAX A
Update rate 4ms write
4.02 Active current
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
112111
Range ±DRIVE_CURRENT_MAX A
Update rate 4ms write
Direction of active current Direction of rotation Torque direction
+ + Forward (accelerating)
- + Reverse (decelerating)
+ - Forward (decelerating)
- - Reverse (accelerating)
4.03 Torque demand
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111111
Range ±TORQUE_PROD_CURRENT_MAX %
Update rate 4ms write
4.04 Current demand
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111111
Range ±TORQUE_PROD_CURRENT_MAX %
Update rate 4ms write
Pr
4.02
Resultant
output current
Pr
4.01
Pr
4.17
y
x