Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
Menu 4
Digitax ST Advanced User Guide 73
Issue Number: 1 www.controltechniques.com
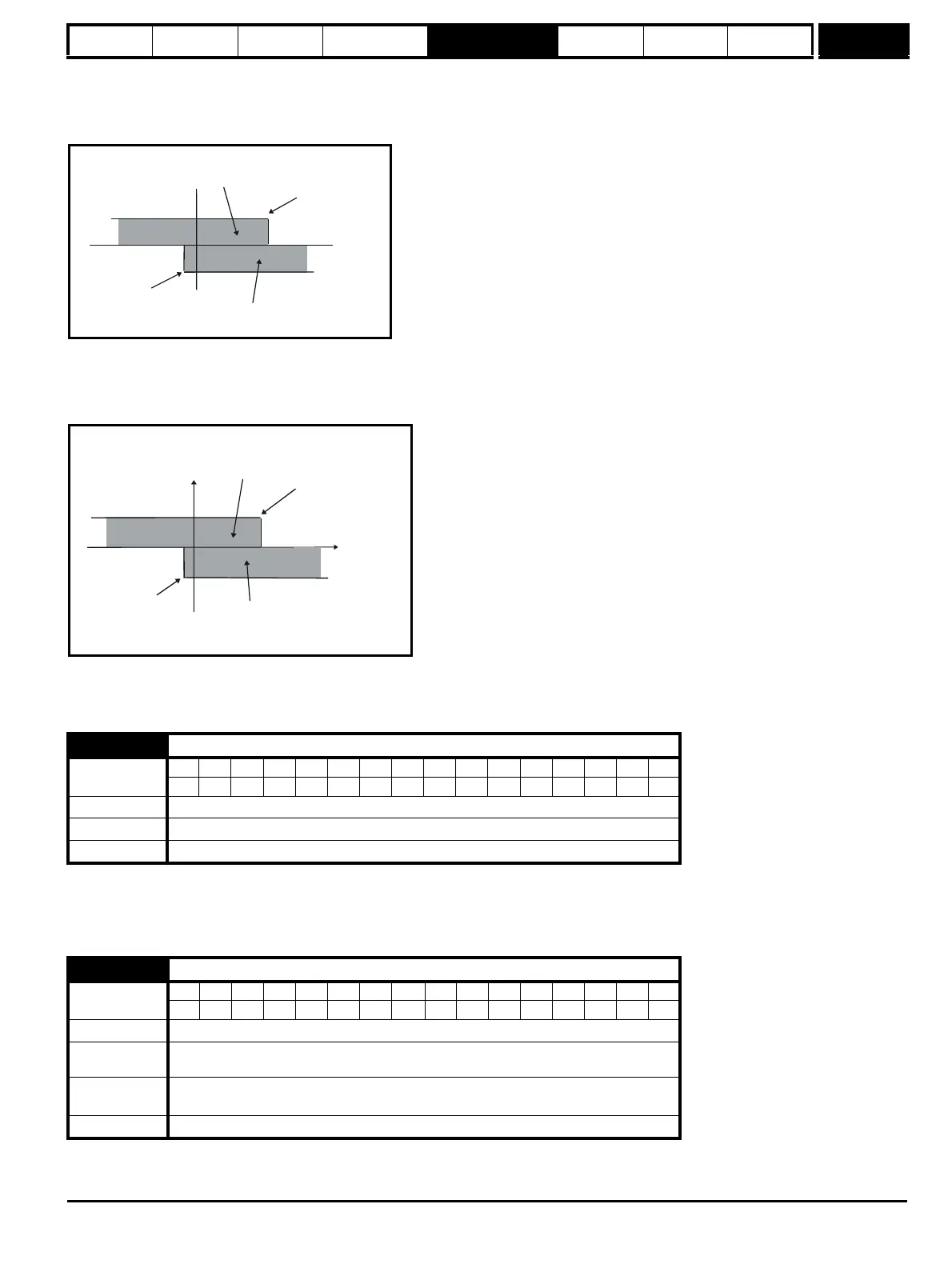
Example of coiler operation:
This is an example of a coiler operating in the positive direction. The final speed demand is set to a positive value just above the coiler reference
speed. If the resultant torque demand is positive the coiler operates with a limited speed, so that if the material breaks the speed does not exceed a
level just above the reference. It is also possible to decelerate the coiler with a negative resultant torque demand. The coiler will decelerate down to -
5rpm until a stop is applied. The operating area is shown in the following diagram:
Example of uncoiler operation:
This is an example for an uncoiler operating in the positive direction. The final speed demand should be set to a level just above the maximum normal
speed. When the resultant torque demand is negative the uncoiler will apply tension and try and rotate at 5rpm in reverse, and so take up any slack.
The uncoiler can operate at any positive speed applying tension. If it is necessary to accelerate the uncoiler a positive resultant torque demand is
used. The speed will be limited to the final speed demand. The operating area is the same as that for the coiler and is shown below:
4: Speed control with torque feed-forward
The drive operates under speed control, but a torque value may be added to the output of the speed controller. This can be used to improve the
regulation of systems where the speed loop gains need to be low for stability.
A first order filter, with a time constant defined by this parameter, is provided on the current demand to reduce acoustic noise and vibration produced
as a result of position feedback quantisation noise. The filter introduces a lag in the speed loop, and so the speed loop gains may need to be reduced
to maintain stability as the filter time constant is increased. Alternative time constants can be selected depending on the value of the speed controller
gain selector (Pr 3.16). If Pr 3.16 = 0 Pr 4.12 is used, if Pr 3.16 = 1 Pr 4.23 is used.
4.12 Current demand filter 1
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range 0.0 to 25.0 ms
Default 0.0
Update rate Background read
4.13 Current controller Kp gain
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Range 0 to 30,000
Default
200V drive: 75
400V drive: 150
Second motor
parameter
Pr 21.22
Update rate Background read
Final speed
demand
Area for coiler operation, speed
limited to ref and positve torque
Area for decelerating the coiler, reverse
speed limited and negative torque
-5rpm
Speed
Torque
-5rpm
Area for normal uncoiler
operation: negative torque,
limited to low speed in reverse
Speed reference
Area for accelerating
uncoiler: positive torque,
limited speed
Speed
Tor que