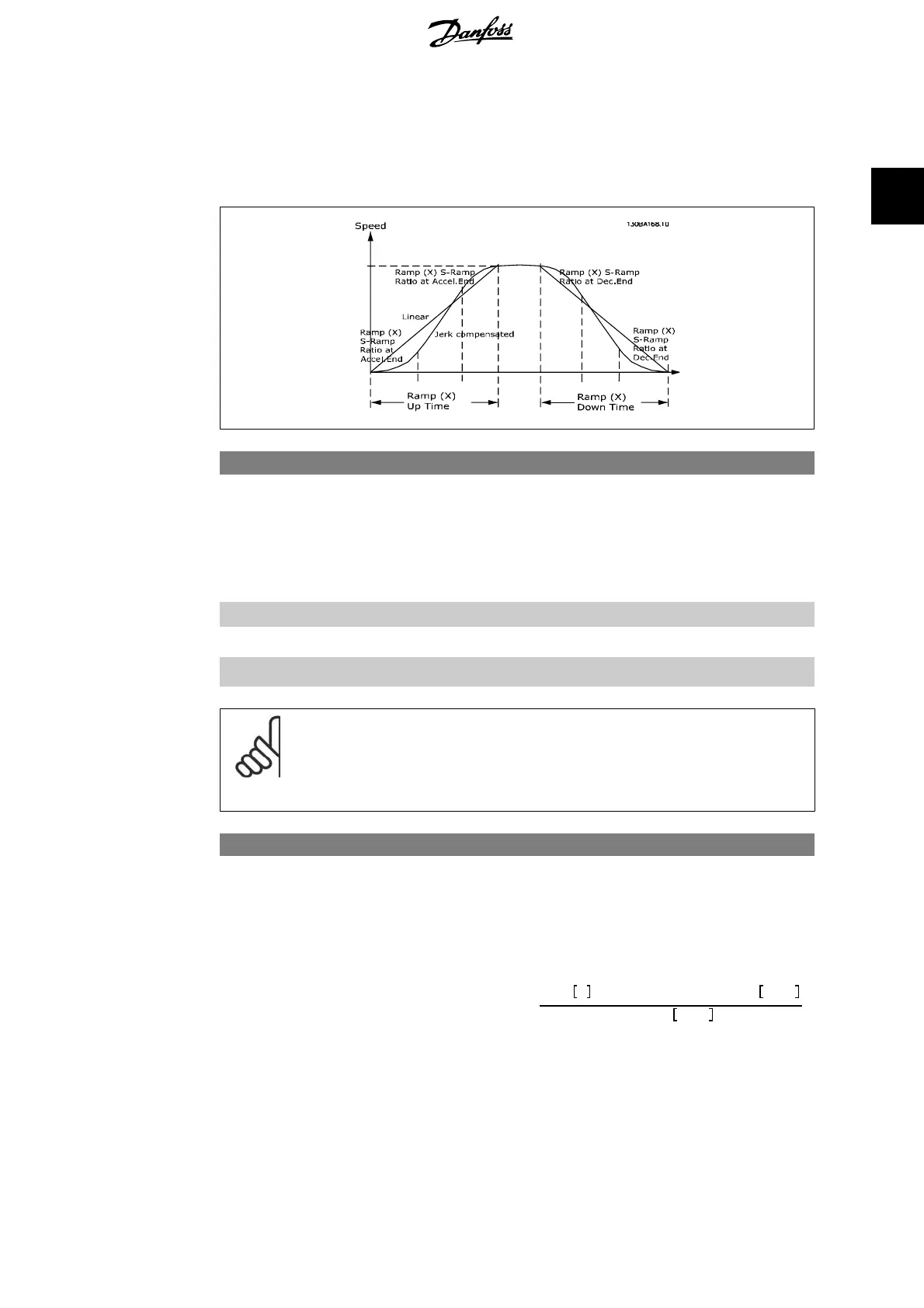
If S-ramps are selected then set the level of non-linear jerk compensation required. Set jerk com-
pensation by defining the proportion of ramp-up and ramp-down times where acceleration and
deceleration are variable (i.e. increasing or decreasing). The S-ramp acceleration and deceleration
settings are defined as a percentage of the actual ramp time.
3-40 Ramp 1 Type
Option: Function:
Select the ramp type, depending on requirements for accelera-
tion/deceleration.
A linear ramp will give constant acceleration during ramping. An
S-ramp will give non-linear acceleration, compensating for jerk
in the application.
[0]
*
Linear
[1] S-ramp Const Jerk Acceleration with lowest possible jerk.
[2] S-ramp Const Time S-ramp based on the values set in par. 3-41 and 3-42.
NB!
If S-ramp [1] is selected and the reference during ramping is changed the ramp time
may be prolonged in order to realize a jerk free movement which may result in a
longer start or stop time.
Additional adjustment of the S-ramp ratios or switching initiators may be necessary.
3-41 Ramp 1 Ramp up Time
Range: Function:
Size re-
lated
[0.01 - 3600.00 s] Enter the ramp-up time, i.e. the acceleration time from 0 RPM
to the rated motor speed n
M,N
(par. 1-25). Choose a ramp-up
time such that the output current does not exceed the current
limit in par. 4-18 during ramping. The value 0.00 corresponds
to 0.01 sec. in speed mode. See ramp-down time in par. 3-42.
Par
.3− 41 =
t
acc
s xn
M
,
N
(
par
.1− 25
)
RPM
Δ
ref RPM
FC 300 Programming Guide 2. How to Programme
MG.33.M2.02 - VLT
®
is a registered Danfoss trademark
77
2

 Loading...
Loading...







