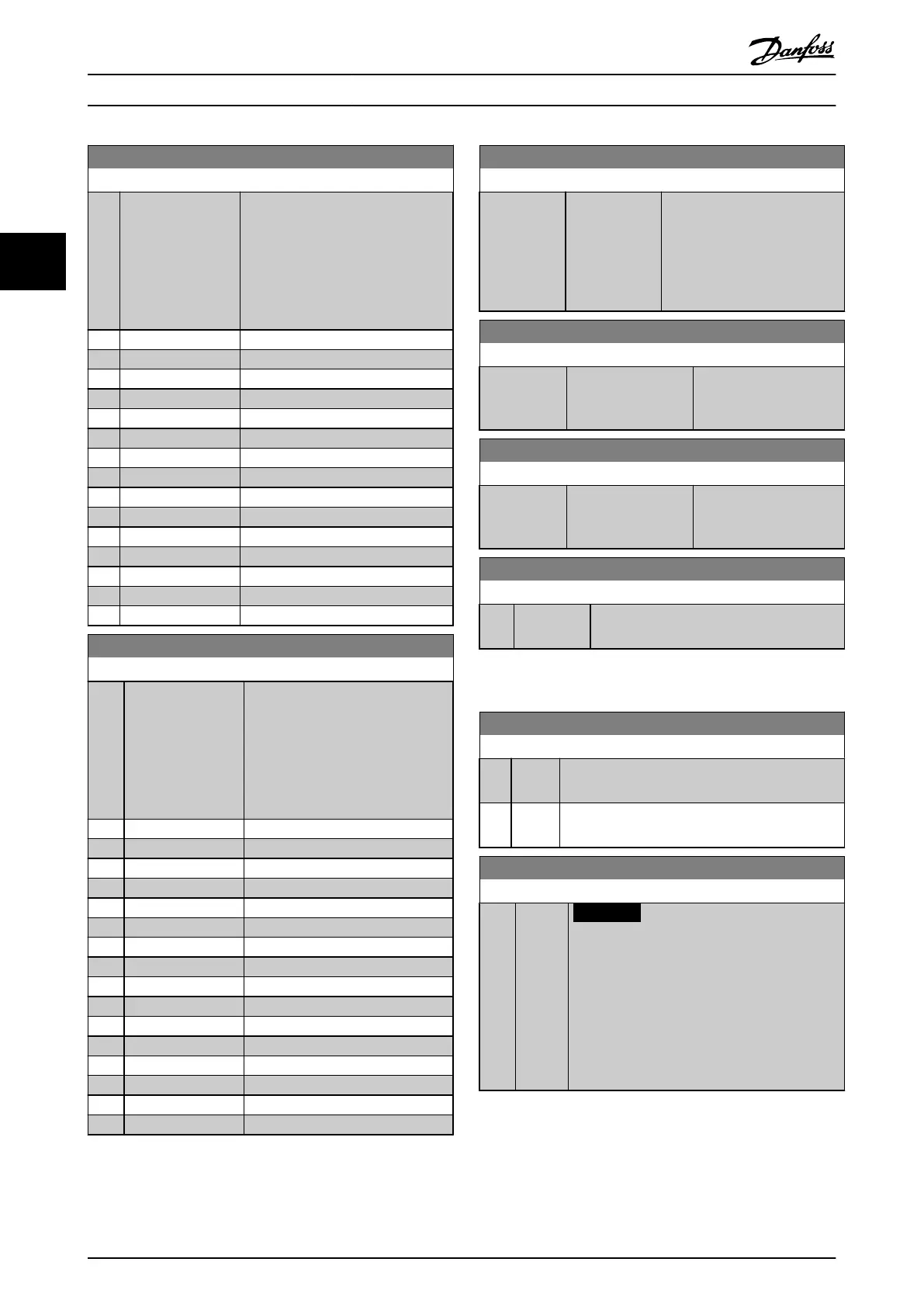
21-13 Ext. 1 Reference Source
Option: Function:
This parameter denes which input
on the frequency converter that
should be treated as the source of
the reference signal for the closed
loop 1 controller. Analog input
X30/11 and analog input X30/12 refer
to inputs on the general purpose I/O.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[7] Pulse input 29
[8] Pulse input 33
[20] Digital pot.meter
[21] Analog input X30/11
[22] Analog input X30/12
[23] Analog Input X42/1
[24] Analog Input X42/3
[25] Analog Input X42/5
[29] Analog Input X48/2
[30] Ext. Closed Loop 1
[31] Ext. Closed Loop 2
[32] Ext. Closed Loop 3
21-14 Ext. 1 Feedback Source
Option: Function:
This parameter denes which input
on the frequency converter should
be treated as the source of the
feedback signal for the closed loop 1
controller. Analog input X30/11 and
analog input X30/12 refer to inputs
on the general purpose I/O.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Pulse input 29
[4] Pulse input 33
[7] Analog Input X30/11
[8] Analog Input X30/12
[9] Analog Input X42/1
[10] Analog Input X42/3
[11] Analog Input X42/5
[15] Analog Input X48/2
[100] Bus Feedback 1
[101] Bus Feedback 2
[102] Bus feedback 3
[104] Sensorless Flow
[105] Sensorless Pressure
21-15 Ext. 1 Setpoint
Range: Function:
0
ExtPID1Unit*
[ par. 21-11 -
par. 21-12
ExtPID1Unit]
The setpoint reference is used
in extended 1 closed loop. Ext.1
Setpoint is added to the value
from the Ext.1 Reference source
selected in parameter 21-13 Ext.
1 Reference Source.
21-17 Ext. 1 Reference [Unit]
Range: Function:
0 ExtPID1Unit* [-999999.999 -
999999.999
ExtPID1Unit]
Readout of the reference
value for the closed loop
1 controller.
21-18 Ext. 1 Feedback [Unit]
Range: Function:
0 ExtPID1Unit* [-999999.999 -
999999.999
ExtPID1Unit]
Readout of the feedback
value for the closed loop
1 controller.
21-19 Ext. 1 Output [%]
Range: Function:
0 %* [0 - 100 %] Readout of the output value for the closed
loop 1 controller.
3.19.3 21-2* Closed Loop 1 PID
21-20 Ext. 1 Normal/Inverse Control
Option: Function:
[0] * Normal Reduces the output when feedback is higher than
the reference.
[1] Inverse Increase the output when feedback is higher than
the reference.
21-21 Ext. 1 Proportional Gain
Range: Function:
0.01* [0 -
10 ]
NOTICE
Always set parameter 20-14 Maximum
Reference/Feedb. before setting the values
for the PID controller in parameter group
20-9* PID Controller.
The proportional gain indicates the number of
times the error between the setpoint and the
feedback signal is to be applied.
If (Error x Gain) jumps with a value equal to what is set in
parameter 20-14 Maximum Reference/Feedb., the PID
controller tries to change the output speed equal to what
is set in parameter 4-13 Motor Speed High Limit [RPM]/
parameter 4-14 Motor Speed High Limit [Hz]. However, the
output speed is limited by this setting.
Parameter Descriptions
VLT
®
HVAC Drive FC 102
154 Danfoss A/S © 03/2015 All rights reserved. MG11CE02
33
 Loading...
Loading...















