Chapter 12 Description of Parameter SettingsC2000
12.1-02-8
Settings Functions Descriptions
37
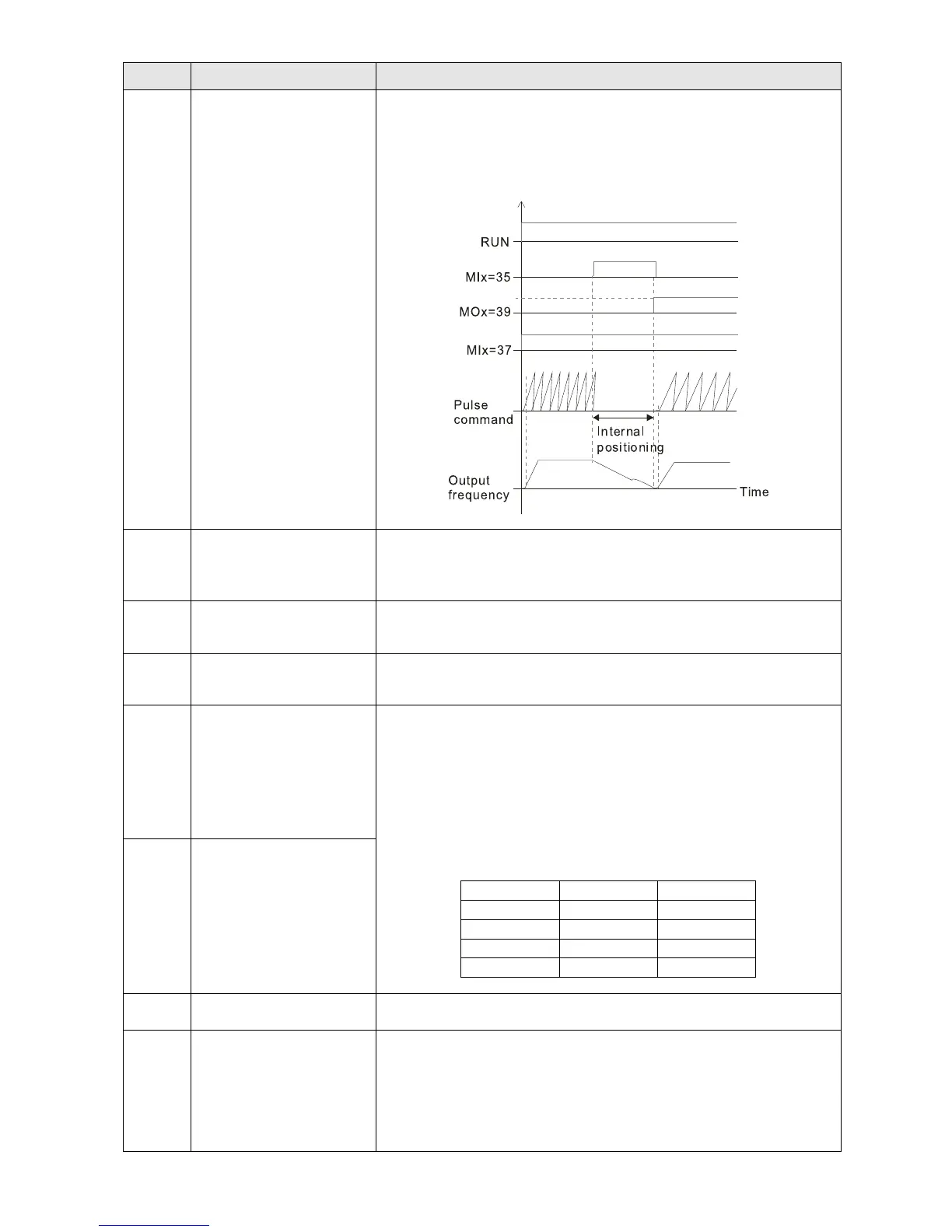
Enable full position
control pulse command
input
When Pr.00-20 is set to 4 or 5, ON: the input pulse of the PG
card is the position command. When using this function, set
Pr.11-25 to 0.
Example: refer to the following diagram when using this function
with MIx=35 returning to homing position.
38
Disable write EEPROM
function
(Parameters memory
disable)
ON: writing to EEPROM is disabled. Changed parameters are
not saved after power off.
39
Torque command
direction
For torque control (Pr.00-10=2), when the torque command is
AVI or ACI, ON: negative torque.
40
Force coasting to stop
ON: during operation, the drive free runs to stop.
41
HAND switch
1. When the MI terminal switches to OFF, it executes a STOP
command. Therefore, if the MI terminal switches to OFF
during operation, the drive stops.
2. Use the optional keypad KPC-CC01 to switch between
HAND and AUTO. The drive stops first, and then switches to
HAND or AUTO status.
3. The optional digital keypad KPC-CC01 displays the current
status of the drive (HAND / OFF / AUTO).
bit1 bit0
OFF 0 0
AUTO 0 1
HAND 1 0
OFF 1 1
42
AUTO switch
43
Enable resolution
selection
Refer to Pr. 02-48 for details.
44
Reverse direction
homing (NL)
Signal input for reverse direction limit switch (NL). ON: the drive
uses the settings in Pr.00-40, 00-41, 00-42 to execute homing in
a reverse direction (counter-clockwise).
Note: NL means the input terminal detection is negative-edge
triggered or is regarded as N.O. (Normally Open).
 Loading...
Loading...





