CHS
17
飞行器姿态的判断从而造成风险。一旦被动进入该模式,则应
当尽快降落到安全位置以避免发生事故。同时应当尽量避免在
GPS 卫星信号差以及狭窄空间飞行,以免被动进入 A 模式,
导致飞行事故。
尽可能使用 P 模式进行飞行。在无法使用 P 模式时,用户可切
换至 A 模式,某些在 P 模式下具备的功能在 A 模式下将无法
使用。所以在使用 A 模式时需格外小心。在室内飞行时,飞行
器将无法在纹理重复度很高的物体表面上空精确悬停。更多关
于使用视觉定位的信息,请参考“视觉系统与红外感知系统”
一节。
1. P 模式(定位):使用GPS模块和视觉系统以实现精确悬停。
飞行器的感度值被适当调低。
2. S 模式(运动):使用GPS模块和视觉系统以实现精确悬停。
该模式下飞行器的感度值将适当调高,最大飞行速度将会提
升。请特别注意,S 模式下飞行器无法主动刹车和躲避障碍
物。请预留至少 50米的刹车距离以保障飞行安全。
3. A 模式 ( 姿态 ):不使用GPS模块与视觉系统进行定位,仅
提供姿态增稳,若 GPS卫星信号良好可实现返航,否则,
返航功能将不能实现。
失控返航
1. 失控返航在 GPS信号欠佳(GPS信号强度低于三格)的情
况下将失效。
2. 长按智能返航按键以启动智能返航,启动智能返航后,飞行
器将会返回最近记录的返航点。请勿采用关闭遥控器电源的
方式强制启动返航功能。
3. 若返航路线上存在高大建筑物会对飞行器返航安全造成影
响,因此在使用失控返航功能前需要预先设定合理的返航高
度。返航过程中,当飞行器上升至 20 米以后但没达到预设
返航高度前,若用户推动油门杆,飞行器将会停止上升并从
当前高度返航。
4. 确保在遥控器通讯范围内操控飞行器。
5. 返航功能会受天气、环境以及地磁等因素影响。
6. 在失控返航过程中,若光照条件欠佳(光照小于 15lux或者
光照大于 10,000lux)时,飞行器将不能自主躲避障碍物。
切勿依赖视觉系统。请保持对飞行器的监控,必要时建议用
户操控遥控器躲避障碍物,或短按遥控器智能返航按键以取
消返航。
7. 失控返航时,如电量允许,飞行器将首先返回至无线信号中
断前的位置点,再直线返回最近记录的返航点。因此,在启
动失控返航之后,飞行器有可能向返航点的反方向飞行。
低电量
1. 严重低电量报警发出后,飞行器将自行下降。此时,用户仍
可以推油门杆拉升飞行高度并控制飞行器航向,使之飞行至
合适场所再降落。
2. 当低电量报警发出时,务必将飞行器在安全地点降落,以防
止飞行器失去动力后对飞行器、人以及动物造成危险。
D-RTK(适用于 M210 RTK V2)
1. 使用原厂配件或经过 DJI 认证的配件。使用非原厂配件有可
能对系统的安全使用造成危险。
2. 请在开阔、不受无线电干扰的环境中使用 D-RTK。使用过
程中切勿遮挡 D-RTK 天线,并保持 D-RTK 天空端的天线高
度一致。
3. 请勿过度弯曲和折叠 D-RTK 天线馈线。
视觉系统与红外感知系统
1. 视觉系统无法在没有纹理特征的表面上正常工作,使用视觉
系统时,飞行器最高飞行高度为 10 米。在 0.5米以下快速
飞行时,视觉系统可能无法正常工作。
2. 视觉系统在水面上可能无法正常工作。因此,当降落功能触
发时,飞行器可能无法主动回避下方水域。建议用户对飞行
保持全程控制,并根据周围环境进行合理判断,不过度依赖
视觉系统。
3. 由于视觉系统会发出人耳无法识别的超声波,该超声波或会
引起动物不安,使用时请远离动物。
4. 在以下场景下视觉系统无法正常工作:
a. 纯色表面(例如纯黑、纯白、纯红、纯绿)。
b. 有强烈反光或者倒影的表面。
c. 飞行器速度不宜过快,如离地 1 米处时飞行速度不可超
过 5 米 / 秒,离地 2 米不可超过 14米 /秒。
d. 水面或者透明物体表面。
e. 运动物体表面(例如人流上方、大风吹动的灌木或者草
丛上方)。
f. 光照剧烈快速变化的场景。
g. 在特别暗(光照小于 15lux)或者特别亮(光照大于
10,000lux)的物体表面。
h. 对超声波有很强吸收作用的材质表面(例如很厚的地毯)。
i. 纹理特别稀疏的表面。
j. 纹理重复度很高的物体表面(例如颜色相同的小格子砖)。
k. 倾斜度超过 30度的物体表面(不能收到超声波回波)。
l. 细小的障碍物(红外反射能量较少)。
5. 如果遥控器与飞行器断开,且此时 GPS 信号较差,且飞行
器失去对返航位置的判断,但视觉系统工作正常,则飞行器
将悬停 8秒后自动降落。
6. 如果飞行器受到强烈碰撞,则有可能导致需要视觉系统重新
校准。详情请参照用户手册。
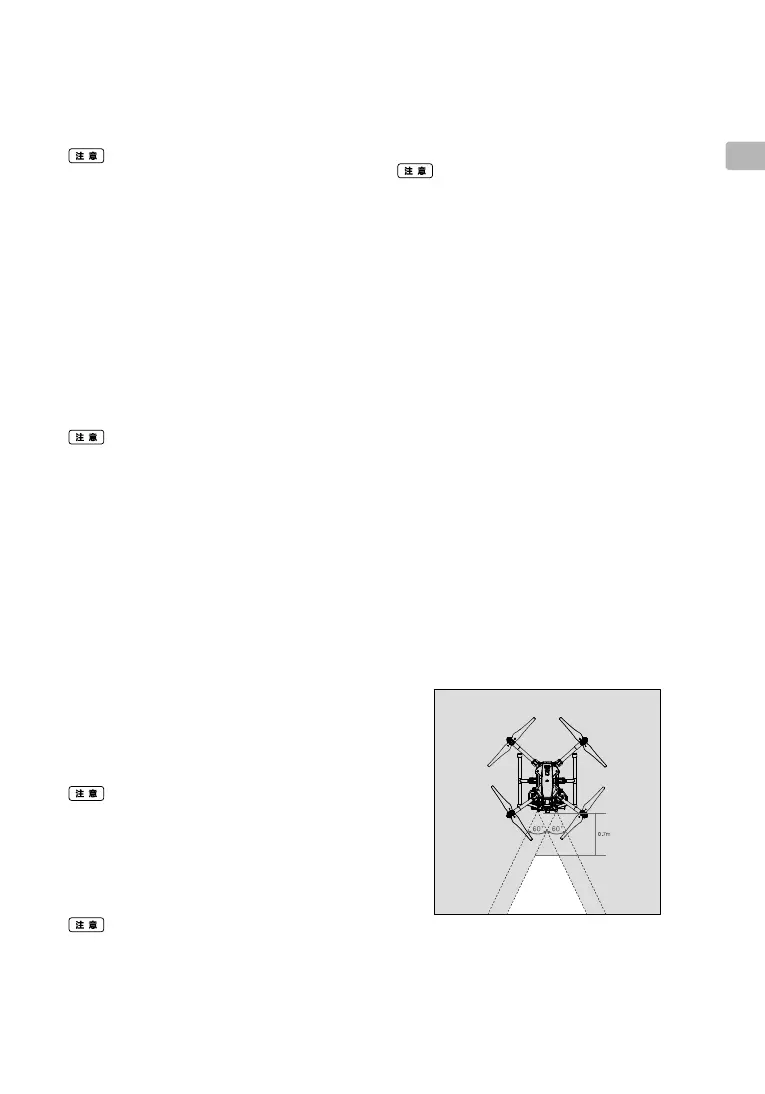
7. 请注意视觉系统与红外感知系统的盲区(灰色)。飞行器无
法主动规避存在于盲区内的障碍物。
 Loading...
Loading...










