Maintenance 13. Calibration
G6 Rev.21 197
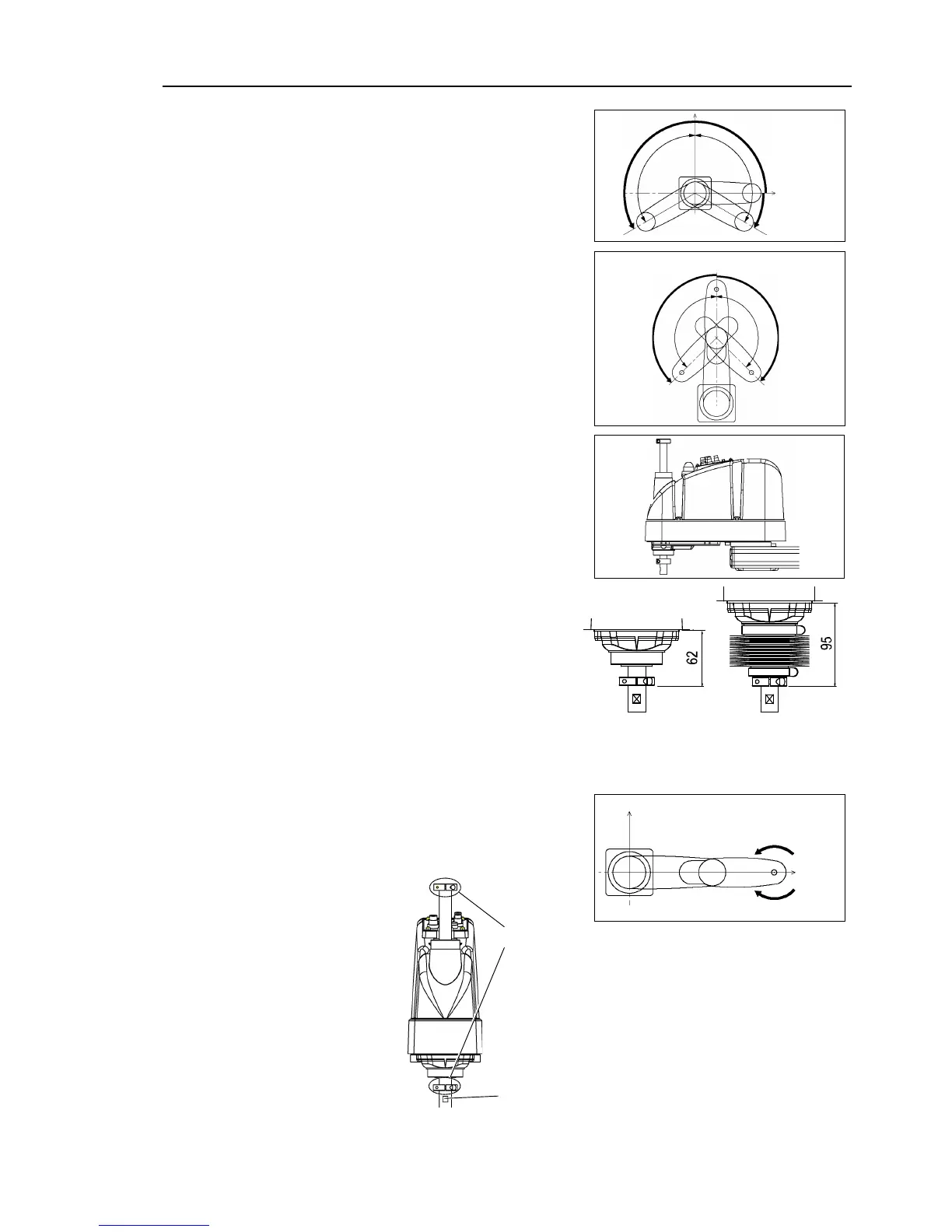
0 pulse position of Joint #1:
position aligned with X-axis in
Robot coordinate system
0 pulse position of Joint #2:
position where Arms #1 and #2
are in a straight line
(Regardless
0 pulse position of Joint #3:
upper limit position in motion
range
The height of Joint #3 depends
on manipulator model.
0 pulse position of Joint #4:
position where the flat surface
(or groove in the up/down
mechanical stop) on the shaft
faces toward the tip of Arm #2