IT x,y,z,w
Independent time constant
The command, IT, is used for smoothing independent moves of the type JG, PR, PA and to smooth vector moves of
the type VM and LM.
The smoothing parameters, x,y,z,w and n are numbers between 0 and 1 and determine the degree of filtering. The
maximum value of 1 implies no filtering, resulting in trapezoidal velocity profiles. Smaller values of the smoothing
parameters imply heavier filtering and smoother moves.
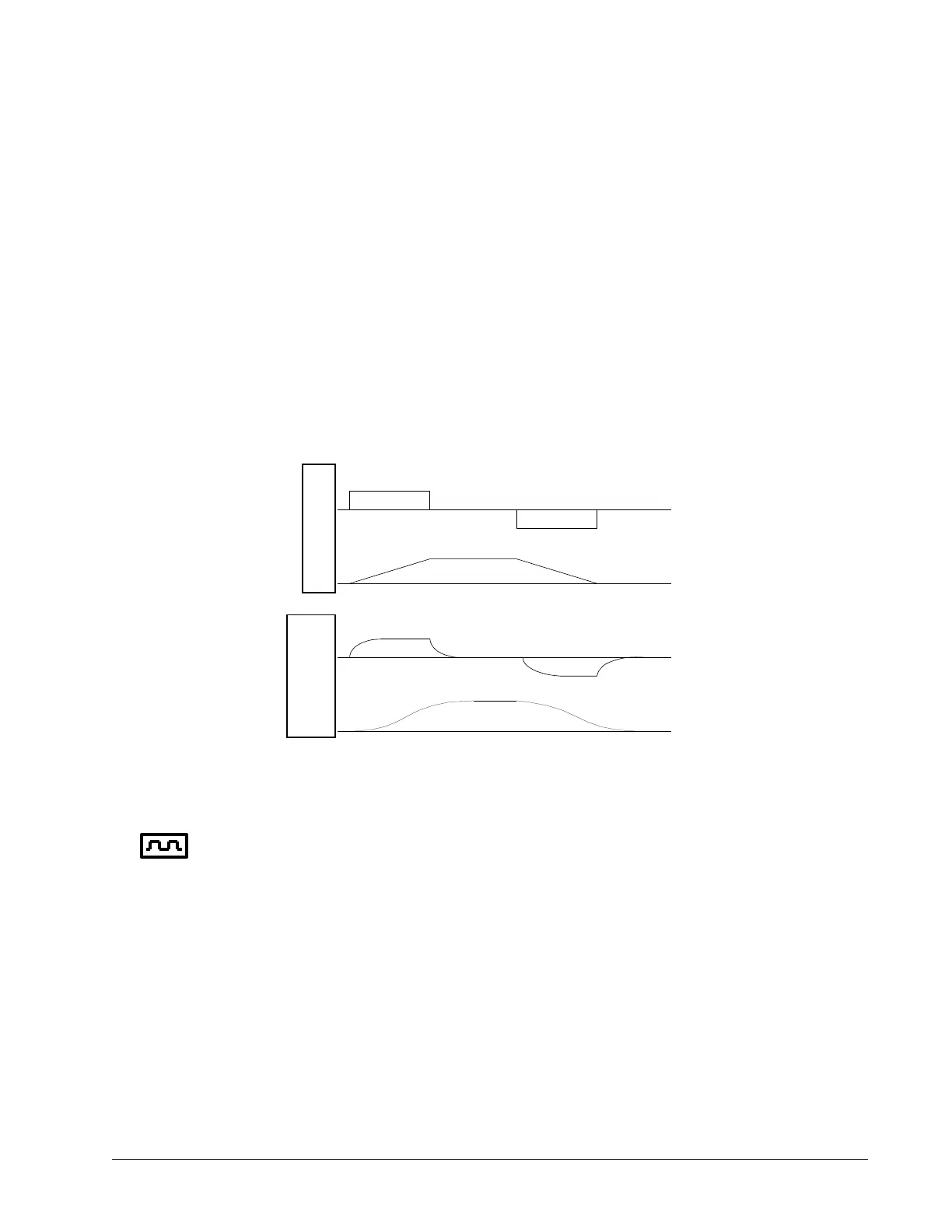
The following example illustrates the effect of smoothing. Figure 6.20 shows the trapezoidal velocity profile and
the modified acceleration and velocity.
Note that the smoothing process results in longer motion time.
Example - Smoothing
PR 20000
Position
AC 100000
Acceleration
DC 100000
Deceleration
SP 5000
Speed
IT .5
Filter for smoothing
BG X
Begin
Figure 6.20: Trapezoidal velocity and smooth velocity profiles
Using the KS Command (Step Motor Smoothing):
When operating with step motors, motion smoothing can be accomplished with the command, KS.
The KS command smoothes the frequency of step motor pulses. Similar to the command IT, this
produces a smooth velocity profile.
The step motor smoothing is specified by the following command:
KS x,y,z,w
where x,y,z,w is an integer from 0.25 to 64 and represents the amount of smoothing
The smoothing parameters, x,y,z,w and n are numbers between 0.25 and 64 and determine the degree of filtering.
The minimum value of 0.25 implies the least filtering, resulting in trapezoidal velocity profiles. Larger values of the
smoothing parameters imply heavier filtering and smoother moves.
Note that KS is valid only for step motors.
Chapter 6 Programming Motion ▫ 113 DMC-40x0 User Manual
After profile
smoothing
No smoothing
ACCELERATION
VELOCITY
VELOCITY
VELOCITY
ACCELERATION

 Loading...
Loading...

