Section 3 Common time synchronization
3.1 Design of the time system (clock synchronization)
GUID-E2B9E81C-5733-4521-B27F-BF33E05CCFB0 v11
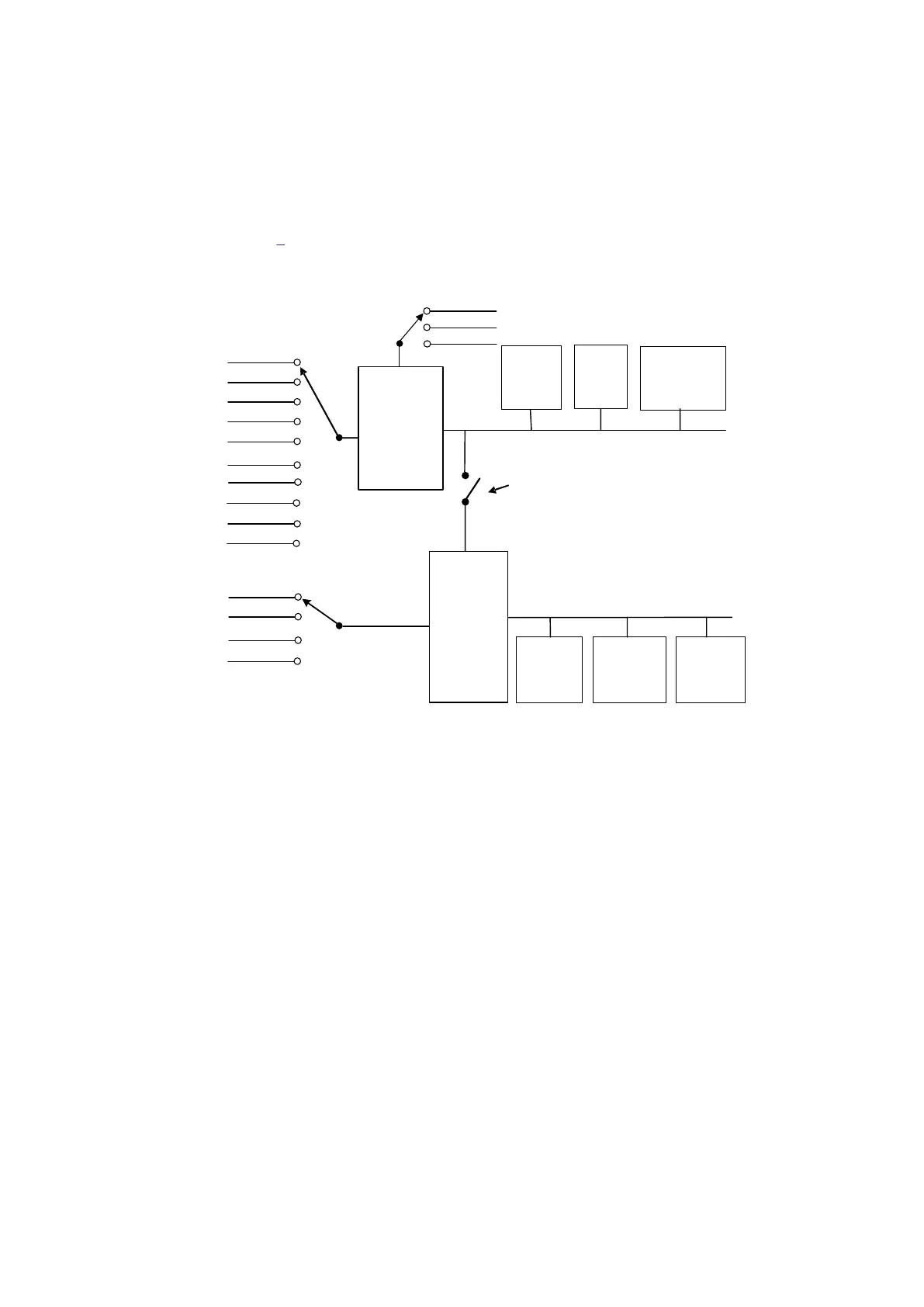
The time system is based on software and hardware clocks that run independently from each other
(see Figure 8).
SW time
Time
regulator
(fast or slow)
Time tagging and general synchronization
Time
regulator
(Setting:
see
Technical
manual
Commu-
nication
Events
Synchronization for differential protection
(Echo mode or GPS)
Diff.
commu-
nication
Connected when GPS time is used
for differential protection or when
PTP is activated or when PMU
report is used
External
synchronization
sources
Merging
units*
LON
SPA
GPS
SNTP
IRIG-B
PPS
Off
Min. pulse
DNP
GPS
IRIG-B
PPS
Off
Protection
and control
functions
A/D
converter
HW time
Off
On
PTP(IEEE 1588)
Slave only
IEC 103
IEC08000287 V6 EN-US
Figure 8: Design of the time system (clock synchronization)
All time tagging is performed by the software clock. When, for example, a status signal is changed in
the protection system of a function based on the free running hardware clock, the event is time
tagged by the software clock when it reaches the event recorder. The hardware clock can thus run
independently.
The echo mode of the line differential protection function is based on the hardware clock. Thus, there
is no need to synchronize the hardware clock and the software clock.
Synchronization of the hardware clock to the software clock is necessary when GPS or IRIG B 00X
with optical fiber, IEEE 1344 is used for differential protection. The two clock systems are
synchronized by a special clock synchronization unit with two modes, fast and slow. A special
feature, an automatic fast clock time regulator is used. The automatic fast mode makes the
synchronization time as short as possible during start-up or at interruptions/disturbances in the GPS
timing. The fast and slow settings are also available on the local HMI.
The hardware and software clocks are synchronized also if a GPS clock is used or if PTP (IEEE
1588) is in on-mode.
SyncLostMode is not required to set as Block/BlockonLostUTC when differential protection is based
on ECHO mode.
1MRK505382-UEN Rev. K Section 3
Common time synchronization
Communication set-up, 670/650 series 17
Application Guide
© 2017 - 2023 Hitachi Energy. All rights reserved
 Loading...
Loading...







