Chapter 5 Function Code Table
- 56 -
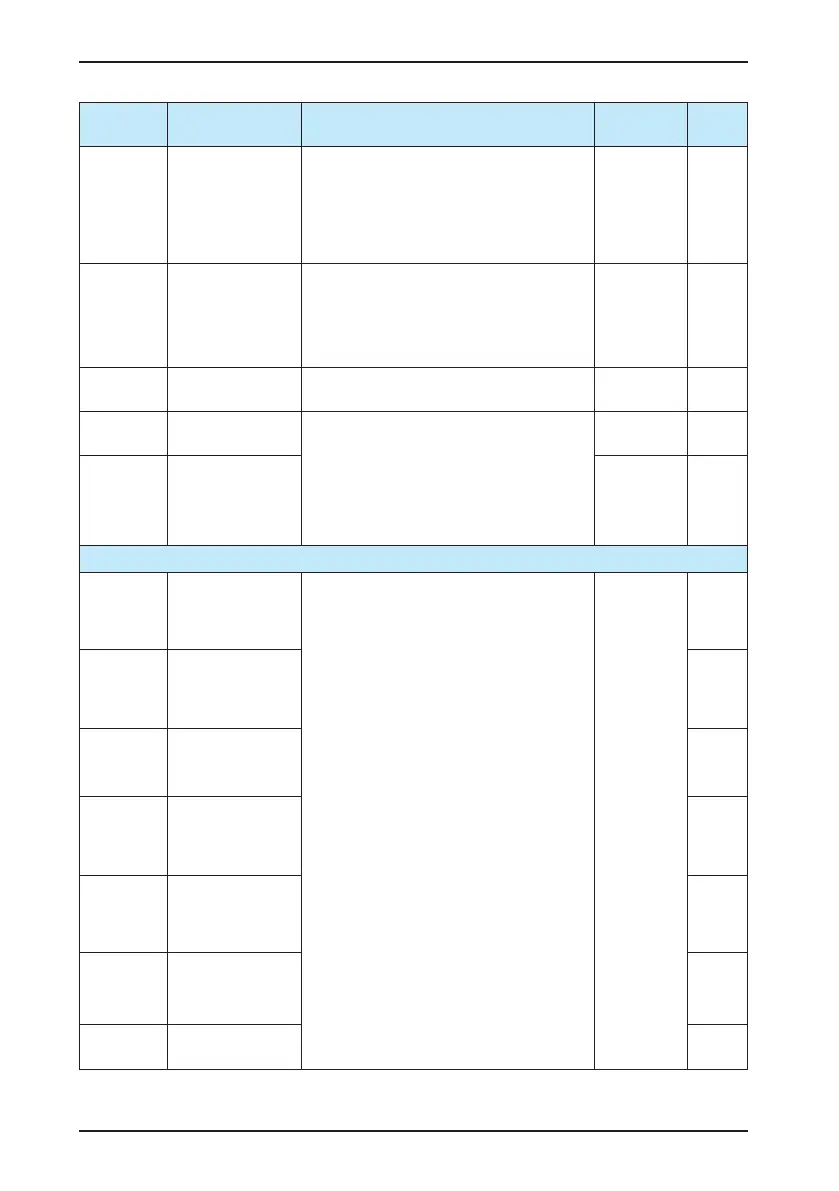
Function
Code
Parameter Name Function Description Setting Range Default
b1.01
Slip compensation For SVC, it is used to adjust the speed stability
accuracy of the motor. When the motor with heavy
load runs at too low speed, increase the value of
this parameter. When the motor with heavy load
runs at too high speed, decrease the value of this
parameter.
50.0% to
200.0%
100.0%
b1.02 Max. frequency When the frequency source is AI or high-speed
pulse, this parameter is the base value for
calculating the target frequency.
It is used to set the upper limit of the frequency
output by the AC drive at any time.
50.00 to
150.00 Hz
50.00 Hz
b1.03 Min. frequency It is used to set the lower limit of the frequency
output by the AC drive at any time.
0.00 to 15.00
Hz
0.00 Hz
b1.04 Forward torque upper
limit
These two parameters are used to set the output
torque upper limit when the DI function 1 (forward
run) and DI function 2 (reverse run 1) are enabled.
They are the percentage of the rated motor torque.
In SVC, even if b1.04 and b1.05 are set to lower
than 50.0%, the AC drive will regard the output
torque upper limit as 50.0%.
0.0% to
500.0%
180.0%
b1.05 Reverse torque upper
limit
0.0% to
500.0%
180.0%
Group b3: Input/output Parameters
b3.01 DI1 function selection 1. Forward run
2. Reverse run
The terminal is used to control forward or reverse
run of the AC drive.
3. Fault reset
The terminal is used for the fault reset function,
which is the same as the function of RESET key
on the operation panel. Remote fault reset is
implemented through this function.
4. Quick stop
If the terminal set for this function becomes ON,
the AC drive immediately outputs the brake apply
frequency (b6.05) and executes the brake apply
time sequence.
5. Coast to stop
If the terminal set for this function becomes ON, the
AC drive stops the output, the motor coasts to stop
without control by the AC drive. It is the same as
coast to stop described in b4.03.
6. Decelerate to stop
If the terminal set for this function becomes ON, the
AC drive stops according to normal deceleration
logic. It is the same as canceling the running
command.
If the
hundred's digit
= 1, it indicates
that the
function logic
is reversed.
Unit's digit
and ten's
digit: function
selection
If they are set
to 0 and 100,
it indicates
that they are
invalid.
1
b3.02 DI2 function selection 2
b3.03 DI3 function selection 8
b3.04 DI4 function selection 9
b3.05 DI5 function selection 3
b3.06 DI6 function selection 5
b3.07 DI7 function selection 0
 Loading...
Loading...




