Chapter 5 Function Code Table
- 86 -
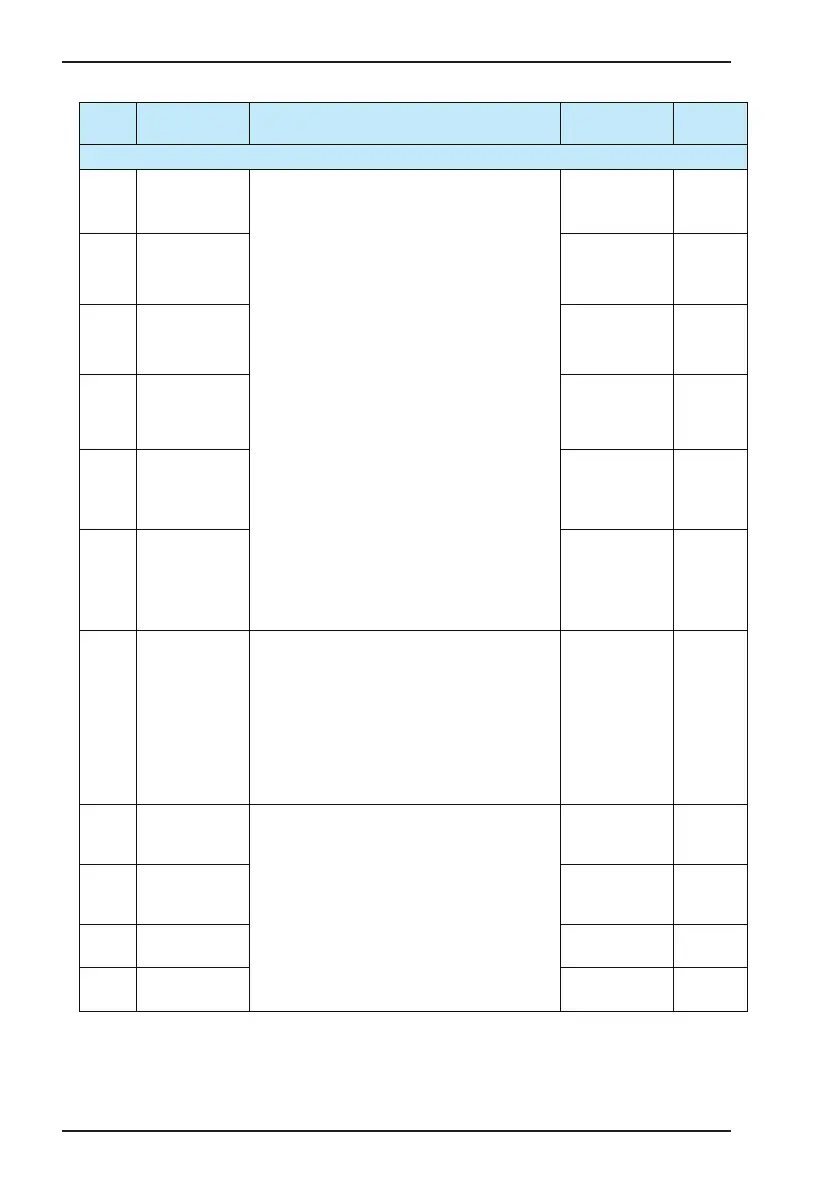
Function
Code
Parameter Name Description Setting Range Default
Group F1: Vector Control Parameters
F1.00
Speed loop
proportional gain 1
The speed loop PI parameters are selected according
to the running frequency of the AC drive. If the
frequency reference is smaller than the switchover
frequency 1 (F1.02), the speed loop parameters
are F1.00 and F1.01. If the frequency reference is
larger than the switchover frequency 2 (F1.05), the
speed loop PI parameters are F1.03 and F1.04. If the
frequency reference is between F1.02 and F1.05, the
two groups of speed loop PI parameters are switched
over linearly.
The speed dynamic response in vector control can be
adjusted by setting the proportional gain and integral
time of the speed regulator.
To achieve a faster system response, increase the
proportional gain and reduce the integral time. Be
aware that this may lead to system oscillation.
If the default setting cannot satisfy requirements, make
ne adjustment. Increase the proportional gain rst
to ensure no system oscillation, and then reduce the
integral time to ensure quick system response and
small overshoot.
Note: Improper setting of PI parameters may result
in too large overshoot and even overvoltage during
overshoot drop.
1 to 100 60
F1.01
Speed loop integral
time 1
0.01s to 10.00s 0.50s
F1.02
Switchover
frequency 1
0.00 Hz to F1.05 5.00 Hz
F1.03
Speed loop
proportional gain 2
1 to 100 20
F1.04
Speed loop integral
time 2
0.01s to 10.00s 1.00s
F1.05
Switchover
frequency 2
F1.02 to b1.02 10.00 Hz
F1.06
Time constant of
speed loop lter
In vector control, the output of the speed loop regulator
is torque current reference. This parameter is used to
lter the torque reference. It rarely need be modied.
Increase the lter time in the case of big speed
uctuation, and decrease it in the case of motor
oscillation.
If the speed loop lter time constant is small, the output
torque of the AC drive may uctuate greatly but the
response is quick.
0.000s to 1.000s 0.080s
F1.08
Excitation
adjustment
proportion gain
These are current loop PI parameters for vector control.
They are obtained automatically through the motor
auto-tuning 2 and rarely need be modied.
Note: The integral regulator of the current loop does
not take integral but integral gain as the dimension.
Too large setting of the current loop PI gain may lead
to oscillation of the entire control loop. Therefore, when
current oscillation or torque uctuation is very large,
decrease the proportional gain or integral gain here.
0 to 20000 2000
F1.09
Excitation
adjustment integral
gain
0 to 20000 1300
F1.10
Torque adjustment
proportion gain
0 to 20000 2000
F1.11
Torque adjustment
integral gain
0 to 20000 1300