Chapter 5 Function Code Table
- 69 -
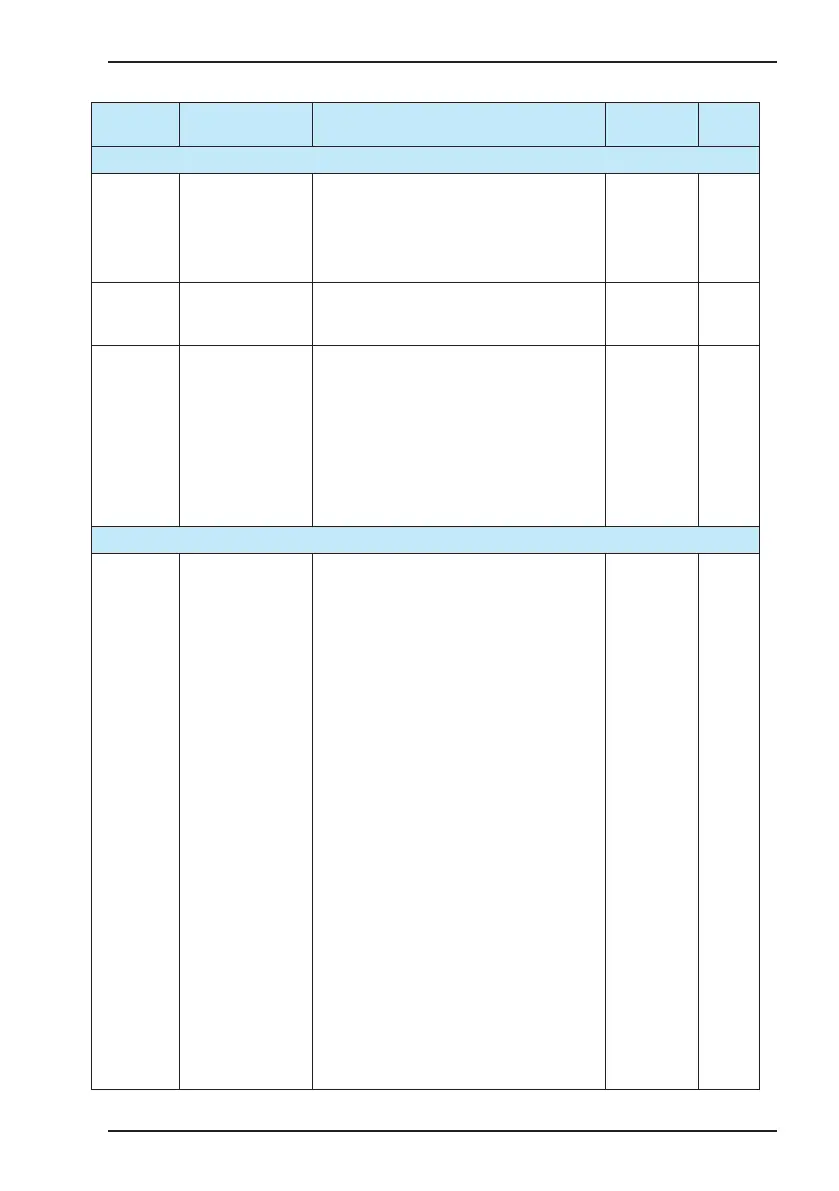
Function
Code
Parameter Name Function Description Setting Range Default
Group bC: Overspeed Protection Parameters
bC.02 Frequency abnormal
detection time
It is used to set the detection time of the fault 37#.
If the motor feedback frequency is in the reverse
direction to the frequency reference for the time set
in this parameter, the AC drive reports the 37# fault.
If it is set to 0, fault 37# is shielded.
0.00s to 1.00s 0.50s
bC.03 Frequency following
error threshold
It is used to set the frequency following error
threshold for detecting the fault 38#. For details,
see the description of bC.04 or the fault 38#.
0% to 30% 20%
bC.04 Frequency following
detection time
It is used to set the detection time of the fault 38#.
If the difference between the motor feedback
frequency and the frequency reference remains
larger than bC.03 x rated motor frequency for the
time set in this parameter, the AC drive reports the
fault 38#.
If it is set to 0, fault 38# is shielded. If both
frequency reference and the output frequency are
larger than the rated frequency, the fault is invalid.
0.00s to 1.00s 0.50s
Group bd: Communication Parameters
bd.00 Baud rate It is used to set the data transmission speed
between the host computer and the AC drive.
Note that the baud rate of the host computer must
be the same as that of the AC drive. Otherwise,
communication will fail. The larger the baud rate is,
faster the communication will be.
Unit's digit: Set the baud rate of RS485
communication
5: 9600 bps
6: 19200 bps
7: 38400 bps
8: 57600 bps
9: 115200 bps
Ten's digit: Reserved
Hundred's digit: Reserved
Thousand's digit: Set the baud rate of CANlink
communication
0: 20 Kbps
1: 50 Kbps
2: 100 Kbps
3: 125 Kbps
4: 250 Kbps
5: 500 Kbps
6: 1 Mbps
0005 to 6009 5005
 Loading...
Loading...




