SV-DA200 series AC servo drives Commissoning
‐213‐
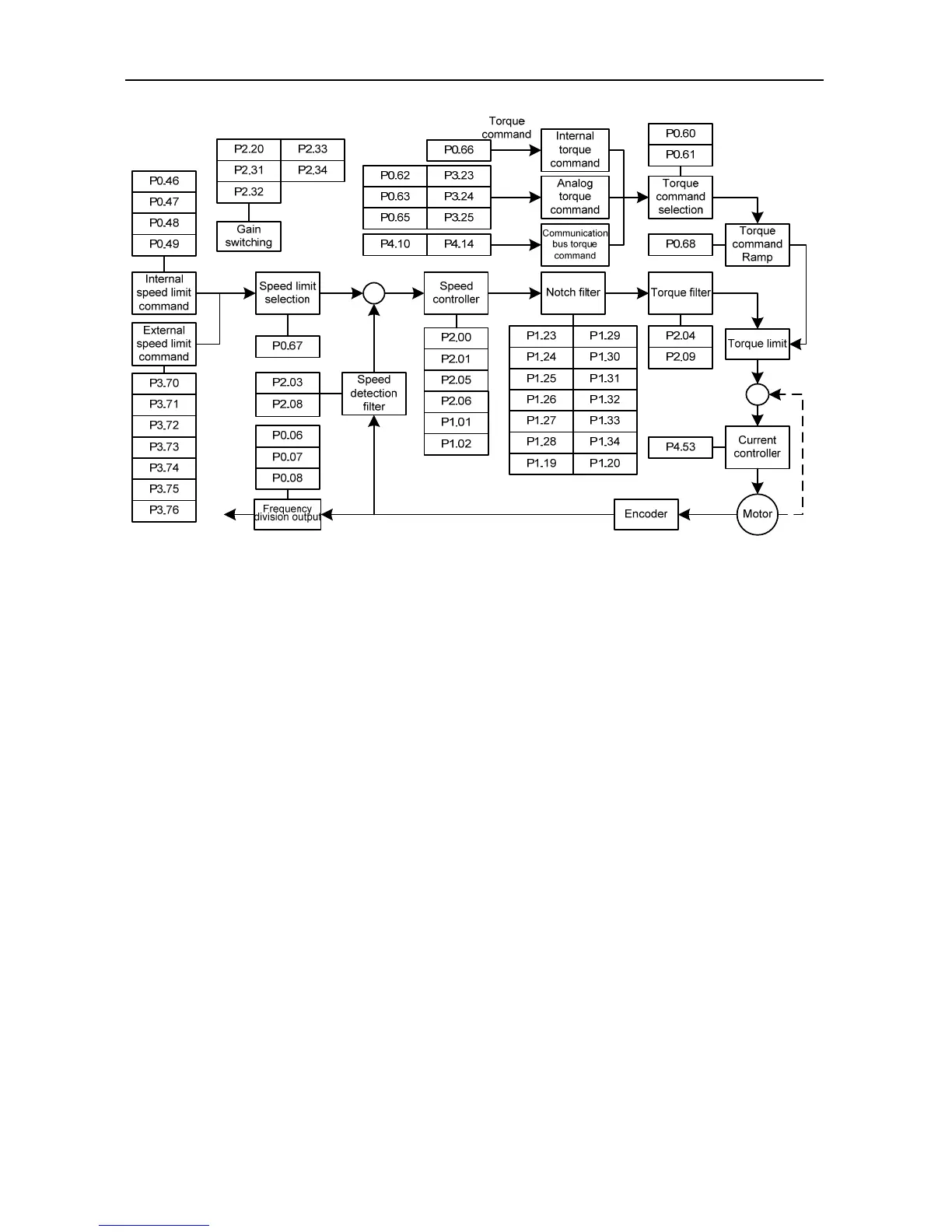
The gain parameters that can be adjusted in the torque mode are marked out on the block diagram.
The general procedures for parameter adjustment in the torque mode are:
1) Initial setting of the parameters
The defaults of the parameters can be recovered by the default parameter recovering operation (see
chapter 5.2.5.3 for details).
2) Adjustment of the torque smoothing filter
In the case the analog torque command is inputted, we can adjust the torque smoothing filter time
constant to make the torque change smoothly.
3) Frequency division of the feedback pulse output
If the feedback pulse of the encoder needs to be outputted, the frequency division coefficient of pulse
output can be used to change the frequency of the output pulse.
7.2.4 Fully-closed loop gain adjustment
The gain parameters which can be adjusted are listed as the figure below:

 Loading...
Loading...