Acc time is the time taken for the motor to accelerate
from 0Hz to the maximum frequency (as set in A0.08),
see t
2
in Fig.6-12. Dec time is the time taken for the
motor to decelerate from maximum frequency (A0.08)
to 0Hz, see t
2
in Fig.6-12.
SV100 define three kinds of Acc/Dec time,and the
drive’s Acc/Dec time 1~4 can be selected by different
combinations of control terminals, refer to the
introductions of A6.00~A6.06 for the definitions of
terminals used to select Acc/Dec time.
Reserved.
6.6 Group A5
A5.07 ASR1/2 switching
frequency
The parameters A5.00~A5.07 are only valid for vector
control mode.
Under vector control mode,it can change the speed
response character of vector control through adjusting
the proportional gain P and integral time I for speed
regulator.
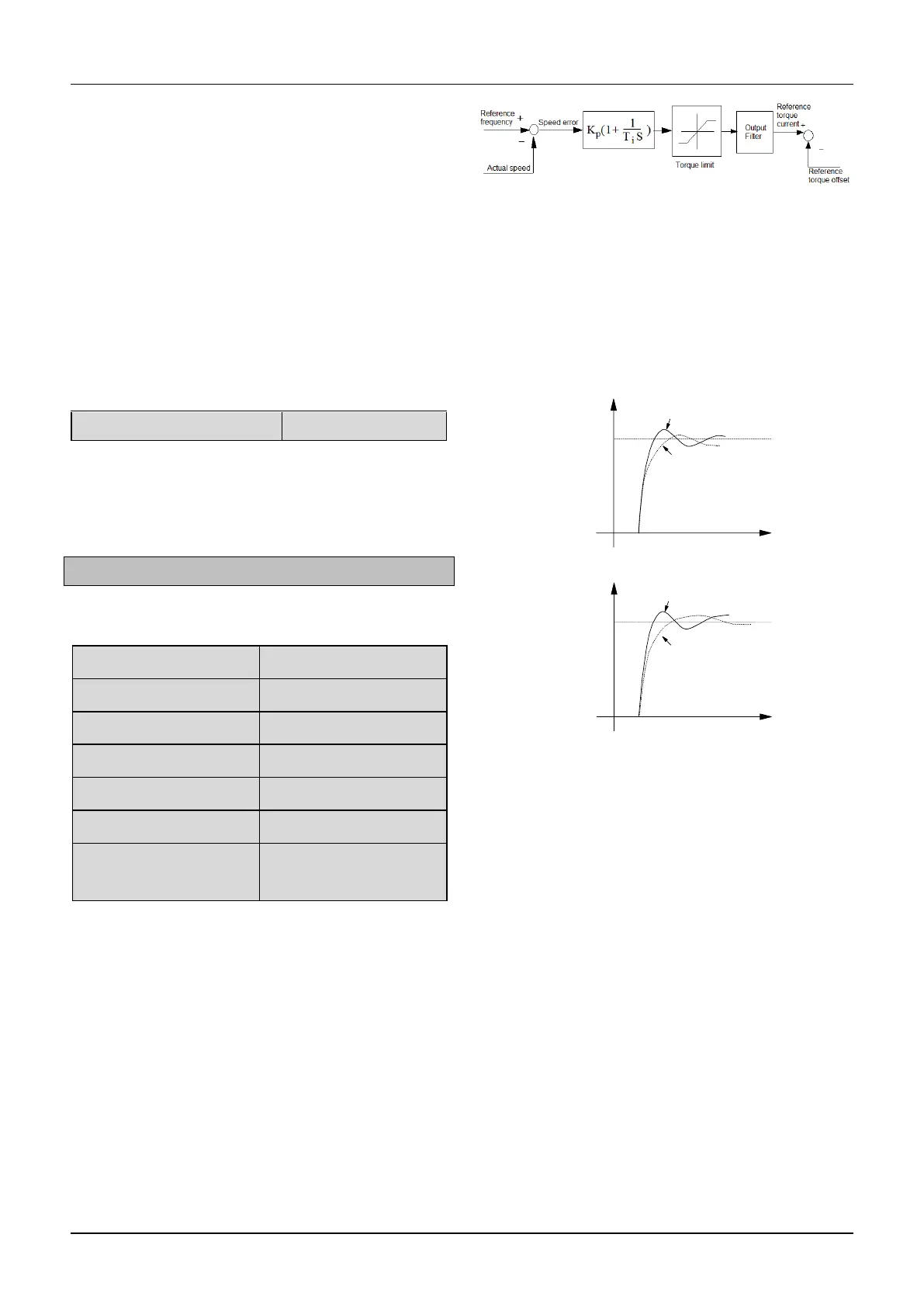
1.The structure of speed regulator (ASR) is shown in
Fig.6-13.In the figure, K
P
is proportional gain P. T
I
is
integral time I.
Fig.6-13 Speed regulator
When integral time is set to 0 (A5.02=0,A5.05=
0),then
the integral is invalid and the speed loop is just a
proportional regulator.
2.Tuning of proportional gain P and integral time I for
speed regulator(ASR).
Fig.6-14 The relationship between step response and PI
parameters of speed regulator(ASR)
When increasing proportional gain P,it can speed up the
system’s dynamic response.But if P is too big,the system
will become oscillating.
When decreasing integral time I,it can speed up the
system’s dynamic response.But if I is too small,the
sysem will become overshoot and easily oscillating.
Generally, to adjust proportional gain P firstly.The value
of P can be increased as big as possible if the system
don’t become oscillating.Then adjust integral time to
make the system with fast response but small
overshoot.The speed step response curve of speed,when
set a better value to P and I parameters,is shown in
Fig.6-15.(The speed response curve can be observed by
Proportional gain
is bigger
Proportional gain
is smaller
 Loading...
Loading...


