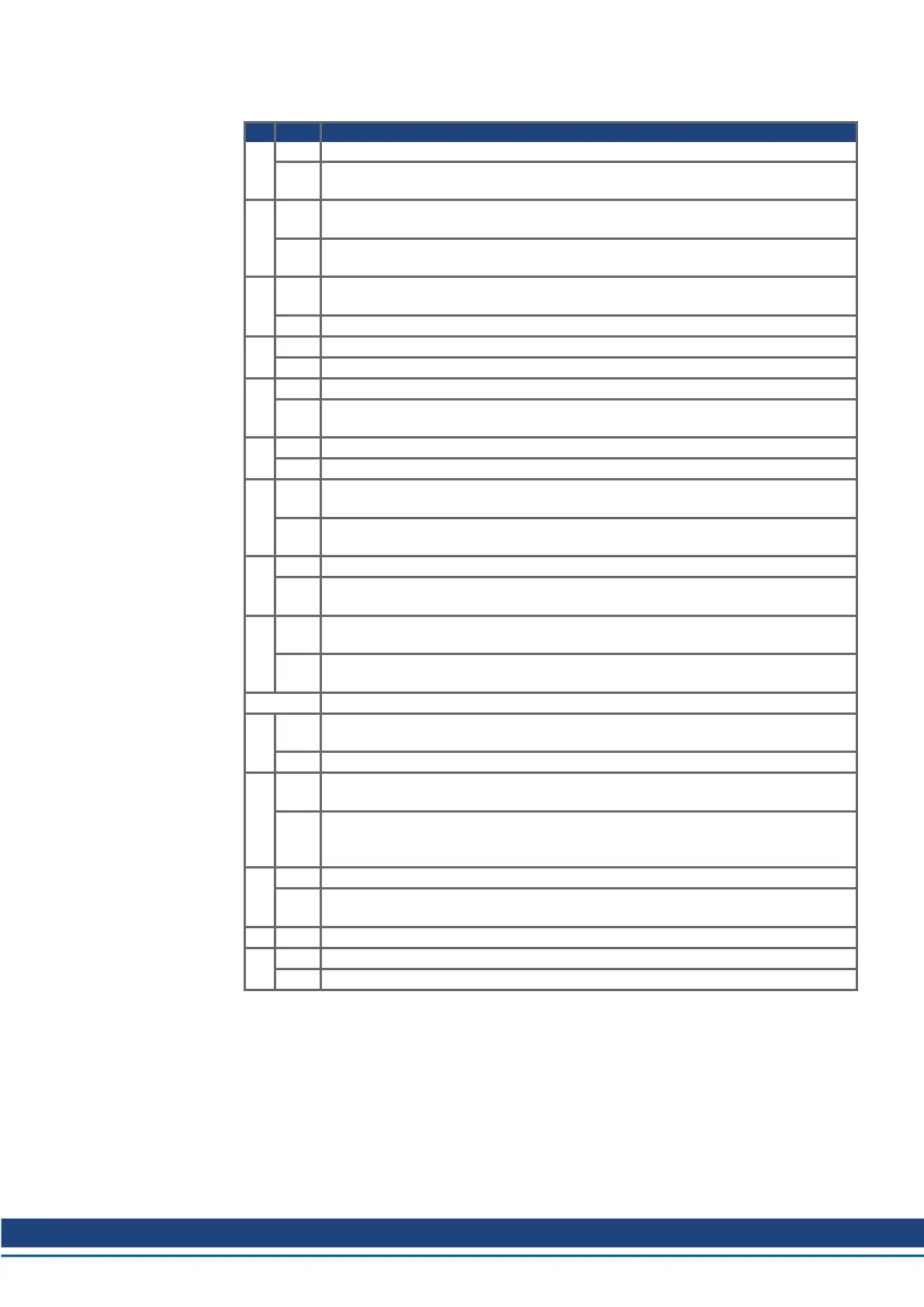
5.2.5.3 PNU 1785: Motion task type
Bit Value Meaning
0
0 The position value that is given is evaluated as an absolute position.
1
The position value that is given is evaluated as a relative traversing distance. The
two following bits then determine the type of relative motion.
1
0
If Bit 1and Bit 2 are set to 0 and Bit 0 set to 1, then the relative motion task is per-
formed according to the “InPosition” bit.
1
The new target position is given by the old target position plus the traversing dis-
tance. Bit 1 has priority over Bit 2.
2
0
If Bit 1and Bit 2 are set to 0 and Bit 0 set to 1, then the relative motion task is per-
formed according to the “InPosition” bit.
1 The new target position is given by the actual position plus the traversing distance.
3
0 no following task available
1 There is a following task, but it must be defined through parameter O_FN, PNU 1788
4
0 Change over to next motion task, with braking to 0 at the target position.
1
Change over to next motion task, without standstill at the target position. The type of
velocity transition is determined by Bit 8.
5
0 Change over to next motion task, without evaluating inputs.
1 A following motion task is started by a correspondingly configured input.
6
0
Start the next motion task by Input State = low or if bit 7 = 1after the delay set in PNU
1789.
1
Start the next motion task by Input State = high or if bit 7 = 1after the delay set in
PNU 1789.
7
0 The next motion task is started immediately.
1
The next motion task is started after the delay time set by PNU 1789 or, if Bit 6 = 1,
previously by a corresponding input signal.
8
0
Only for following motion tasks and Bit 4 = 1: from the target position for the previous
motion task onwards, the velocity is altered to the value for the following motion task.
1
The change of velocity is made so that the velocity at the target position of the pre-
vious motion task matches the value given for the following motion task.
9,10,11 reserved
12
0
Accelerations are calculated according to the run-up/acceleration and run-
down/braking times for the motion task.
1 the deceleration/aceleration ramps are interpreted in mm/s²
13
0
The target position and target velocity of a motion task are interpreted as incre-
ments.
1
The target position and target velocity are recalculated as increments before the
start of the motion task. The parameters PGEARI and PGEARO are used for this pur-
pose.
14
0 The programmed velocity is used as the velocity for the motion task.
1
The velocity for the motion task is determined by the voltage present on analog input
1at the start of the motion task.
15 - reserved
16
0 S300/S700 only: a motion task with trapezoid profile is started
1 S300/S700 only: a table motion task (sin2 profile) is started. Bit 9 must be set to 0.
Bits 0 to 15 are transmitted as motion task type in PZD 6 (mode "positioning") with direct motion
tasks.
Bit 16 is not affected by the motion task type transmitted with the process data in PZD 6 and there-
fore must be written with PNU 1785 to the parameter channel.
5.2.5.4 PNU 1783: Acceleration time
This parameter defines the total time or rate (depending on the type of units selected for accel-
eration) to reach the target velocity for the motion task.
S300-S400-S600-S700 PROFIBUS | 5 Parameter channel (PKW)
Kollmorgen | kdn.kollmorgen.com | December 2019 31

 Loading...
Loading...








