37
5 Use in the field
5.1 Physical positioning of UWB sensor
In order to optimise search results, it is necessary to position the device so that the lower parts and
obstacles being scanned (walls, etc.) are as close as possible (there must be no space between
the lower part of the device and the obstacles).
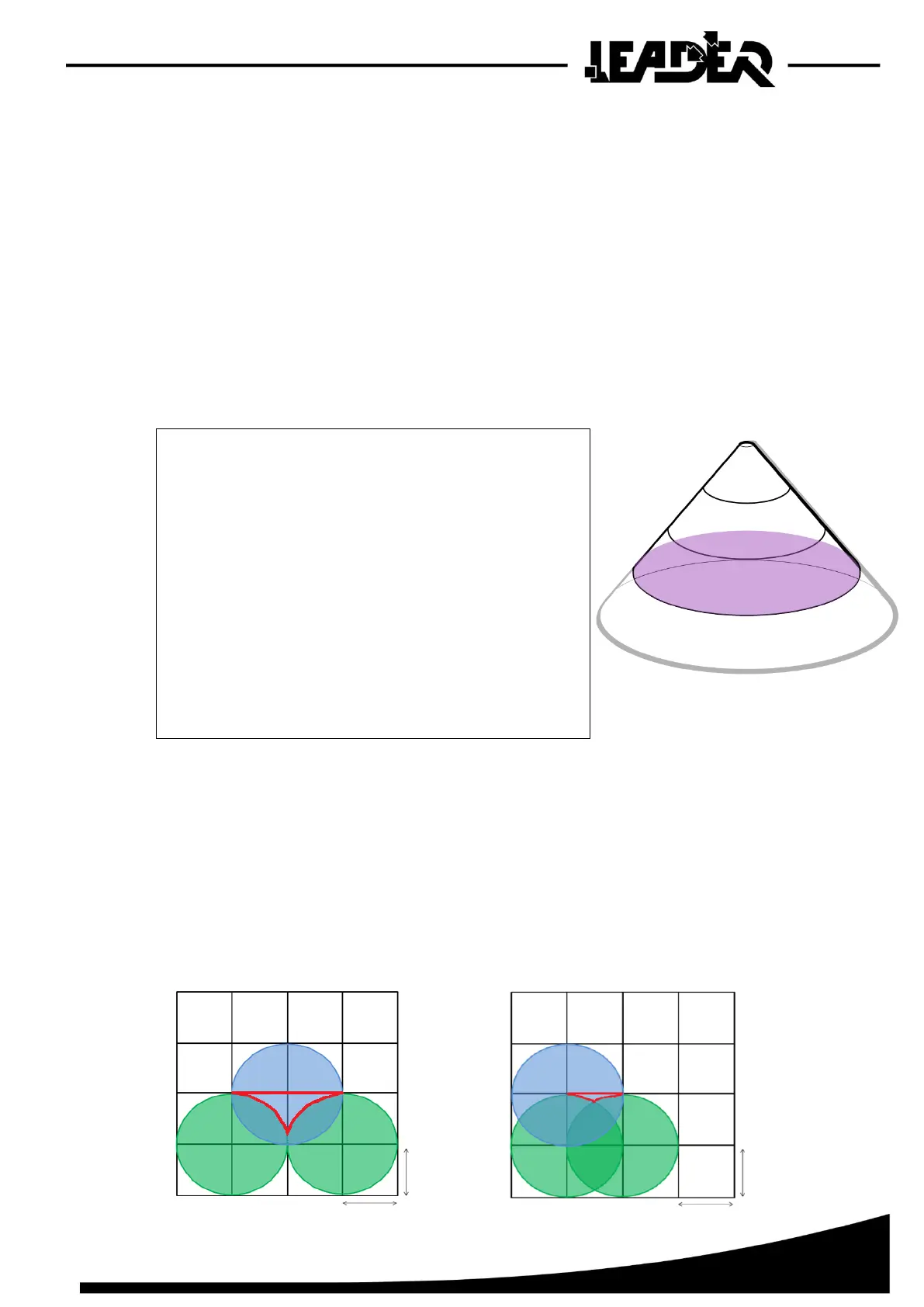
The LEADER Scan sensor can detect movement in a cone area in a vertical position. The rubble
density extends the detection angle, as the debris acts like a lens for the UWB antenna. The UWB
sensor search angle is 90° x 90°.
(See table in appendix p46).
Due to the 5m(15ft) diameter circle footprint at 5m(15ft) distance, it is recommended to move the
UWB sensor above rubble in a 5mx5m (15ft x 15ft) virtual grid pattern (or 10mx10m(30ft x 30ft))
within the disaster zone to located the buried victims, whilst an operator follows the progress from
the control box.
Overlap is necessary between each position, given that the rubble density slightly modifies
the detection angle and that certain zones are not covered due to the circular shape of the detection
zone. This process helps avoid missing a zone where a victim could be found (see red zone in
illustrations above).