FParameter
No.
of parameter error.
#
I
No
Parameter
Description
Setting range
(Unit)
Encoder orientation:
Encoder
Magnesensor
The angle of the creep speed is set.
Standard setting: 180
Orientation
1 33 21
PGl
1st decelera-
Magnesensor orientation:
0
-
500ms
tion point
The time taken for start of creep
speed after passing over linear zone
is set.
Standard setting: 133
0
-
359
(degl
Orientation
The angle at which creep speed for
2 34 22 PG2
2nd decelera-
position loop state is set.
0
-
40(deg
tion point
Standard setting: 20
The position loop gain of the spindle
in the synchronous tap cycle is set.
Synchronous
3 35 23 PGC tap position
Standard setting: 15.00
0.01
-
999.99
loop gain
(rad/s)
It should conform with the position
loop gain in the synchronous tap state
of the feed axis.
The position error range of which the
Encoder Magnesensor
Orientation
in-
orientation complete signal is output
4 36 24
2RZ
is set.
position range
0
-
359
0
-
39
Standard setting: 1.00
(deg) (deg)
5 37 25 OSP
z;;,,tatlon
The orientation speed is set.
0
-
1000
(rpm)
Standard setting: 220
6 38 26 CSP Creep speed
The creep speed is set.
0
-
1000
(rpm)
Standard setting: 20
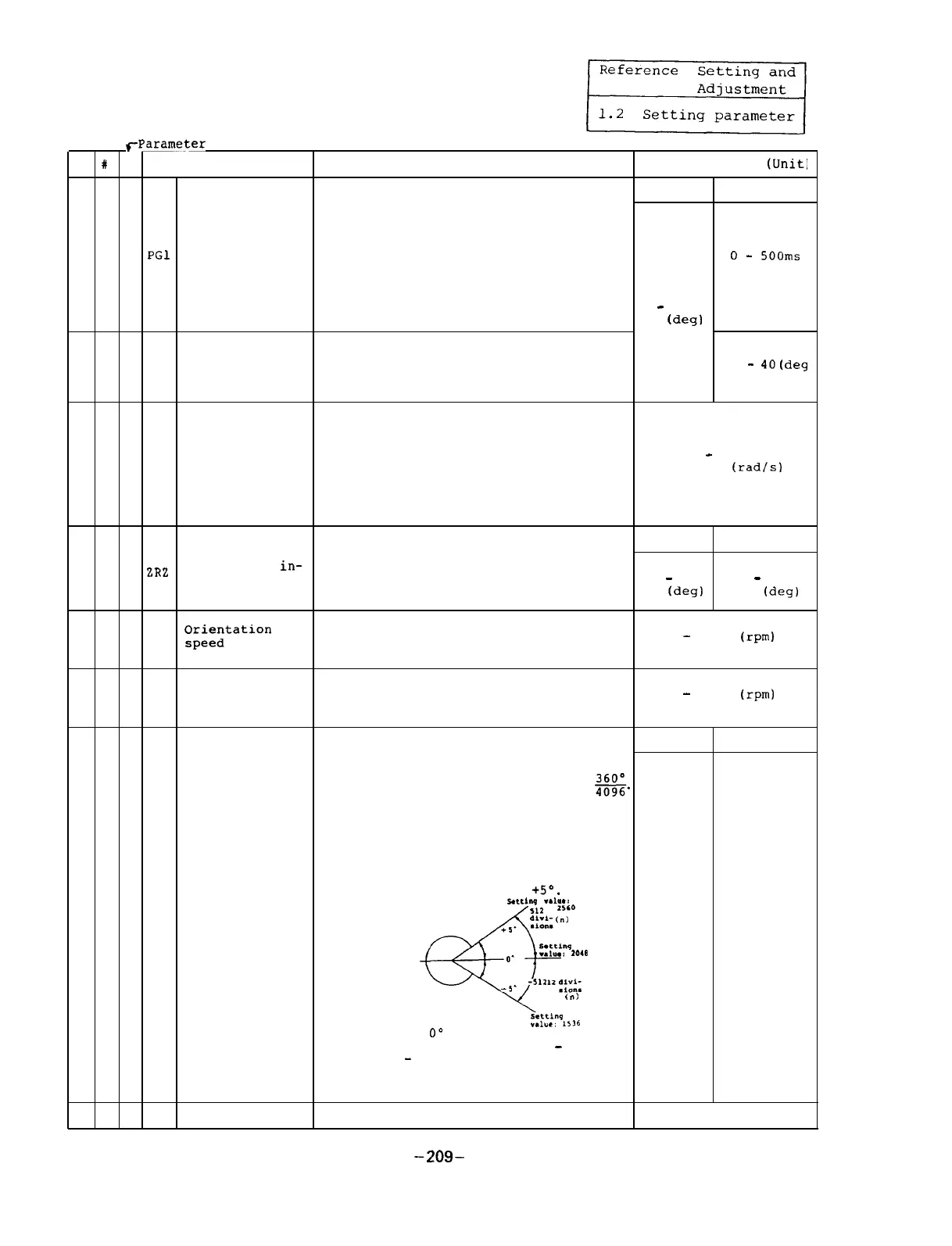
[Encoder orientation]
Encoder Magnesensor
The orientation stop position is set.
The setting value 1 accords with
K.
The data change during the orienta-
tion stop becomes valid from the next
orientation.
[Magnesensor orientation]
The orientation stop position is set
in the range from -5" to
+S".
7 39 27 PST Position shift
%Ullq
..II.Z
o- 4095
@F
25‘0
1536 -2560
)11
::::;cn,
(pulse)
+s'
6.Lelng
0'
..I".,
1041
_5.
-'12
:;;:;
("1
Z&ring
".1"I:
1516
Assuming that
0'
is set to 2048, in the
+ direction, 2048 + n; in the
-
direc-
tion,
2048
-
n.
The data during orientation stop can be
also changed.
8 40 28 BRC
Not used. 0 should be set.
Continued on the next page-
-209-

 Loading...
Loading...