-
#
-
19
-
50
E
JO
-
trameter
No. of
parai
31
:sp
-
:sp
-
-
51
33
:SN
-
52
-
34
SLIT
-
53
-
54
-
55
-
5t
-
-
35
PLM
Torque limit
-
36
JKP
-
37
-
3E
-
JKI
-
TYI
-
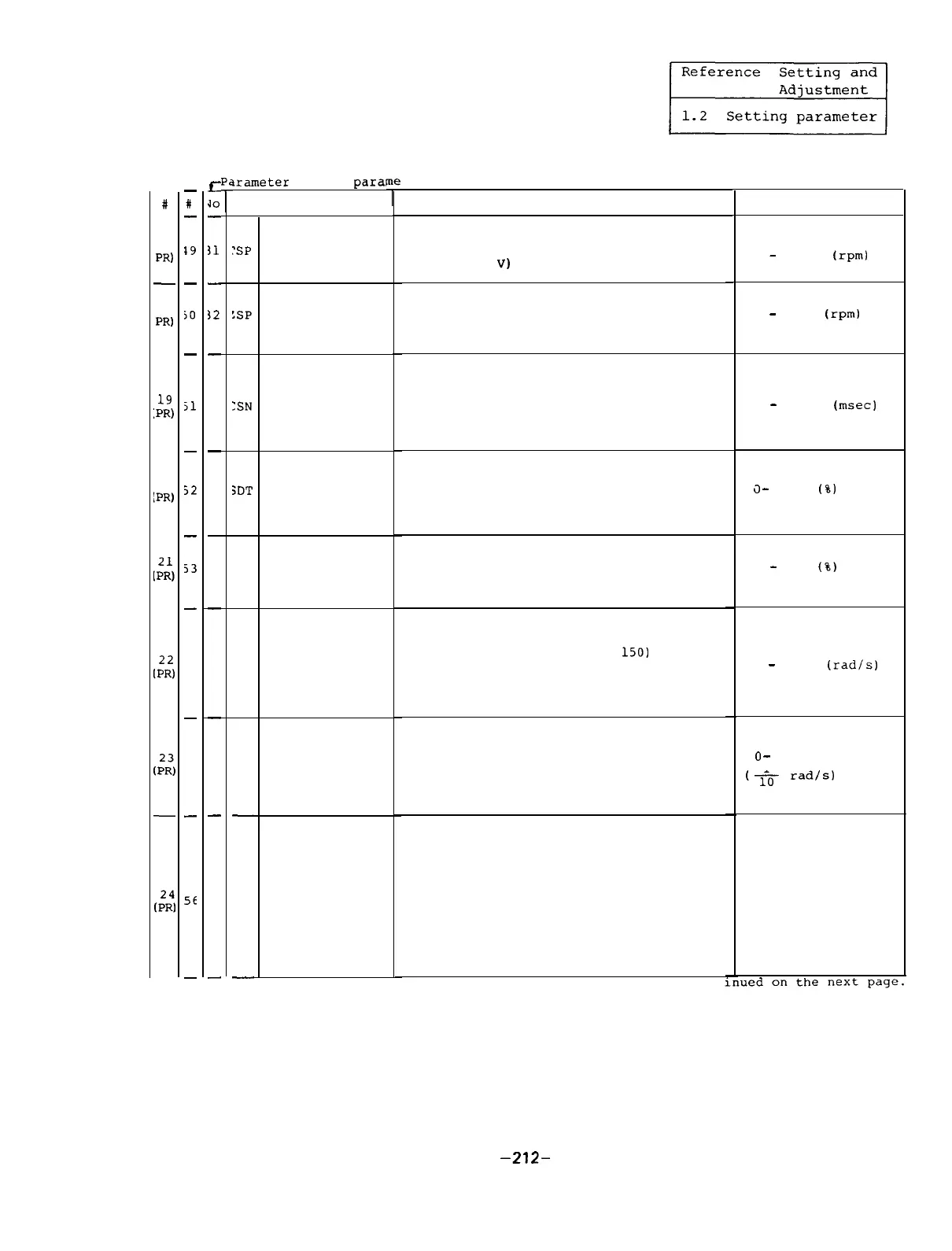
Parameter
ter error
Description
The motor maximum speed is set.
(The speed when the analog reference
speed is 10
V)
The speed for the zero speed output is
set.
Standard setting:
50
The time constant of the speed refer-
ence
from 0 to maximum speed is set.
(This parameter is invalid in the posi-
tion loop state.)
Standard setting:
300
The speed for the speed detection out-
put against the motor maximum speed is
set in percentage.
Standard setting: 10
The limit ratio of the torque limit
signal TL2 is set.
Standard setting: 10
The proportional gain of the speed loop
is set.
Although increasing the para-
meter value (around 100 to
1501
cause
the responsibility to be increased,
vibration and sound become large.
Standard setting:
63
The speed loop integration gain is set.
It should be set in such a manner that
the ratio against VKP becomes nearly
same.
Standard setting:
60
The process for which the speed loop
is switched to the position loop is
set.
0: Position loop/zero return is
required after orientation opera-
tion.
1: Position loop/zero return is not
required at the current position.
Standard setting: 1
Cont
Setting range (Unit)
11
17
PR)
-
18
PR)
Motor maximum
speed
0
-
32767
(i-pm)
Motor zero
speed
0
-
1000
(rpm)
Acceleration/
deceleration
time constant
19
,PR)
0
-
32767
(msec)
20
IPR)
Speed detection
rate
0
-
100
(2)
0
-
120
(%)
Speed loop pro-
portional gain
0
-
1000
(rad/s)
0
-
1000
1
(10
rad/s)
Speed loop
integration gai
Position loop
IN type
-212-

 Loading...
Loading...