2-14
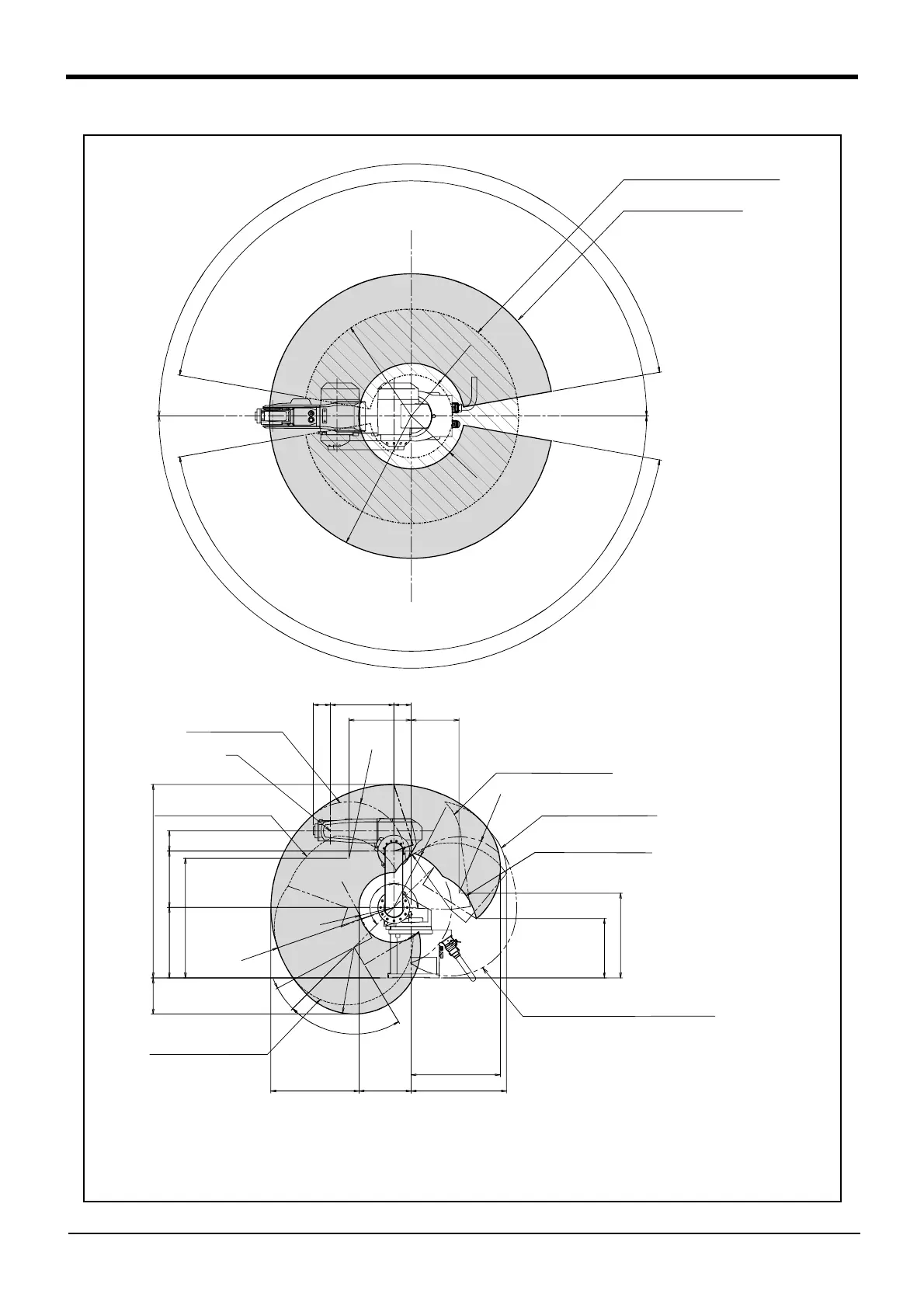
Outside dimensions ・ Operating range diagram
2 Robot arm
Fig.2-4 : Operating range diagram : RV-6S/6SC
Restriction on wide angle in the rear section
Note1) J2+J3×2 ≧ -200 degree when -45 degree≦ J2 < 15 degree.
Note2) J2+J3 ≧ 8 degree when |J1|≦ 75 degree, J2 < -45 degree.
Note3) J2+J3 ≧ -40 degree when |J1|> 75 degree, J2 < -45 degree.
Restriction on wide angle in the front section
Note4) J3 ≧ -40 degree when -105 degree≦ J1 ≦ 95 degree, J2 ≧ 123 degree.
Note5) J2 ≧ 110 degree when J1 < -105 degree, J1 < -95 degree.
However, J2 - J3 ≦ 150 de
ree when 85 de
ree J2 ≦ 110 de
ree.
1
7
0
°
1
7
0
°
1
7
0
°
R
2
5
8
R
5
2
6
R
2
0
2
R
6
9
6
1
7
0
°
P-point path: Reverse range
(alternate long and short dash line)
P-point path: Entire range
(solid line)
P
R
6
1
1
100
961
280350
179
85
315
308
238
85
R
2
8
0
R
2
8
0
R
1
7
3
1
3
5
°
R
3
3
1
9
2
°
R
3
3
1
76
°
1
7
°
R
2
8
7
258
437
444
421
294
474
Flange downward
limit line(dotted line)
Restriction on wide angle
in the rear section
Note1)
Areas as restricted by Note1) and Note3)
within the operating range
Restriction on wide angle
in the rear section
Note3)
Restriction on wide angle
in the rear section
Note2)
Restriction on wide angle
in the front section
Note5)
Restriction on wide angle
in the front section
Note4)
594

 Loading...
Loading...



